1) Give a description of the problem
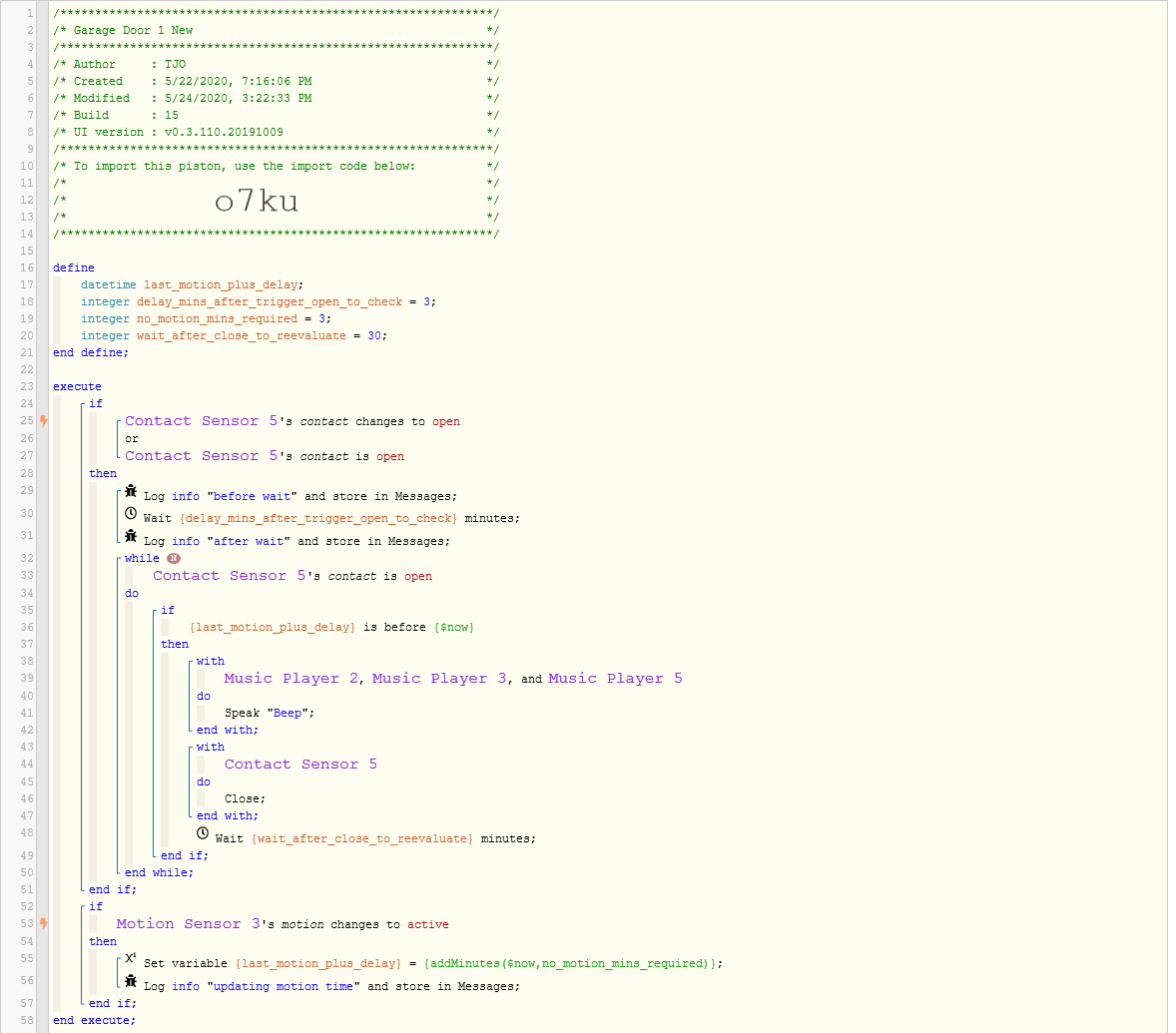
My goal is to start a piston when garage door is open, wait a period of time and then start checking whether there is no motion and then close the garage door.
looking at trace it does not go into while loop…but I cannot see why… the contact is open
2) What is the expected behaviour?
Should go into while loop where it would check if enough time has passed with no motion and then do a CLOSE
3) What is happening/not happening?
skips right over while loop
**4) Post a Green Snapshot of the piston![image|45x37]

(UPLOAD YOUR IMAGE HERE)
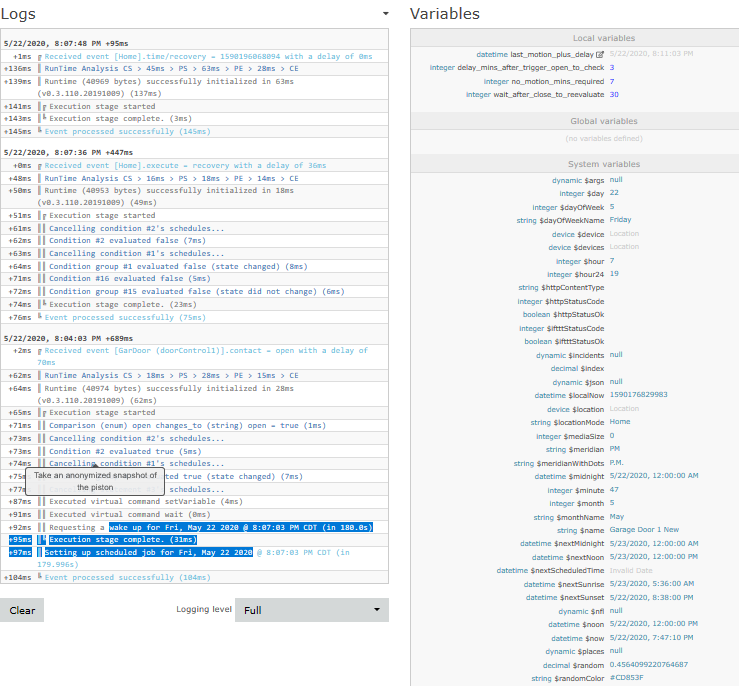
5) Attach logs after turning logging level to Full
5/22/2020, 8:07:48 PM +95ms
+1ms
╔Received event [Home].time/recovery = 1590196068094 with a delay of 0ms
+136ms
║RunTime Analysis CS > 45ms > PS > 63ms > PE > 28ms > CE
+139ms
║Runtime (40969 bytes) successfully initialized in 63ms (v0.3.110.20191009) (137ms)
+141ms
║╔Execution stage started
+143ms
║╚Execution stage complete. (3ms)
+145ms
╚Event processed successfully (145ms)
5/22/2020, 8:07:36 PM +447ms
+0ms
╔Received event [Home].execute = recovery with a delay of 36ms
+48ms
║RunTime Analysis CS > 16ms > PS > 18ms > PE > 14ms > CE
+50ms
║Runtime (40953 bytes) successfully initialized in 18ms (v0.3.110.20191009) (49ms)
+51ms
║╔Execution stage started
+61ms
║║Cancelling condition #2’s schedules…
+62ms
║║Condition #2 evaluated false (7ms)
+63ms
║║Cancelling condition #1’s schedules…
+64ms
║║Condition group #1 evaluated false (state changed) (8ms)
+71ms
║║Condition #16 evaluated false (5ms)
+72ms
║║Condition group #15 evaluated false (state did not change) (6ms)
+74ms
║╚Execution stage complete. (23ms)
+76ms
╚Event processed successfully (75ms)
5/22/2020, 8:04:03 PM +689ms
+2ms
╔Received event [GarDoor (doorControl1)].contact = open with a delay of 70ms
+62ms
║RunTime Analysis CS > 18ms > PS > 28ms > PE > 15ms > CE
+64ms
║Runtime (40974 bytes) successfully initialized in 28ms (v0.3.110.20191009) (62ms)
+65ms
║╔Execution stage started
+71ms
║║Comparison (enum) open changes_to (string) open = true (1ms)
+73ms
║║Cancelling condition #2’s schedules…
+73ms
║║Condition #2 evaluated true (5ms)
+74ms
║║Cancelling condition #1’s schedules…
+75ms
║║Condition group #1 evaluated true (state changed) (7ms)
+77ms
║║Cancelling statement #3’s schedules…
+87ms
║║Executed virtual command setVariable (4ms)
+91ms
║║Executed virtual command wait (0ms)
+92ms
║║Requesting a wake up for Fri, May 22 2020 @ 8:07:03 PM CDT (in 180.0s)
+95ms
║╚Execution stage complete. (31ms)
+97ms
║Setting up scheduled job for Fri, May 22 2020 @ 8:07:03 PM CDT (in 179.996s)
+104ms
╚Event processed successfully (104ms)Preformatted text
or
REMOVE BELOW AFTER READING
If a solution is found for your question then please mark the post as the solution.