1) Give a description of the problem
I have created a piston to track when our dog leaves, returns, and run some automations if the door is opened from the outside (without the dog having previously left). The state of the door is tracked by a ST Multipurpose sensor, and I’m using the x-axis to determine whether it was first opened from the inside or the outside.
The door can swing both ways (it hangs vertically and typically swings both directions for a couple of seconds after the dog enters or leaves).
2) What is the expected behaviour?
If the door is first opened from the inside (x-axis value goes above 400, meaning the door was pushed outward), note that the dog has left.
If the door is then later opened from the outside (x-axis value goes below -400, meaning the door was pushed inward), note that the dog is back inside.
If the door is opened from the outside while the dog is still inside, turn on the lights and notify me. (Suggesting another animal, or a person, has opened it).
3) What is happening/not happening?
Because the door swings both directions once it’s pushed open (e.g. if the dog leaves, the door will swing back both directions (negative and positive x-asis values) until it stops the swing back at a nearly neutral value. Both “if” triggers are triggering every time the door opens, because it swings both directions.
I’ve tried restricting it by creating the “processing” variable, with the hopes that the first trigger will lock out the second (for when the door swings back), so only the proper trigger plays out, but it seems that the “processing” variable doesn’t get updated quick enough, so WebCore registers both events.
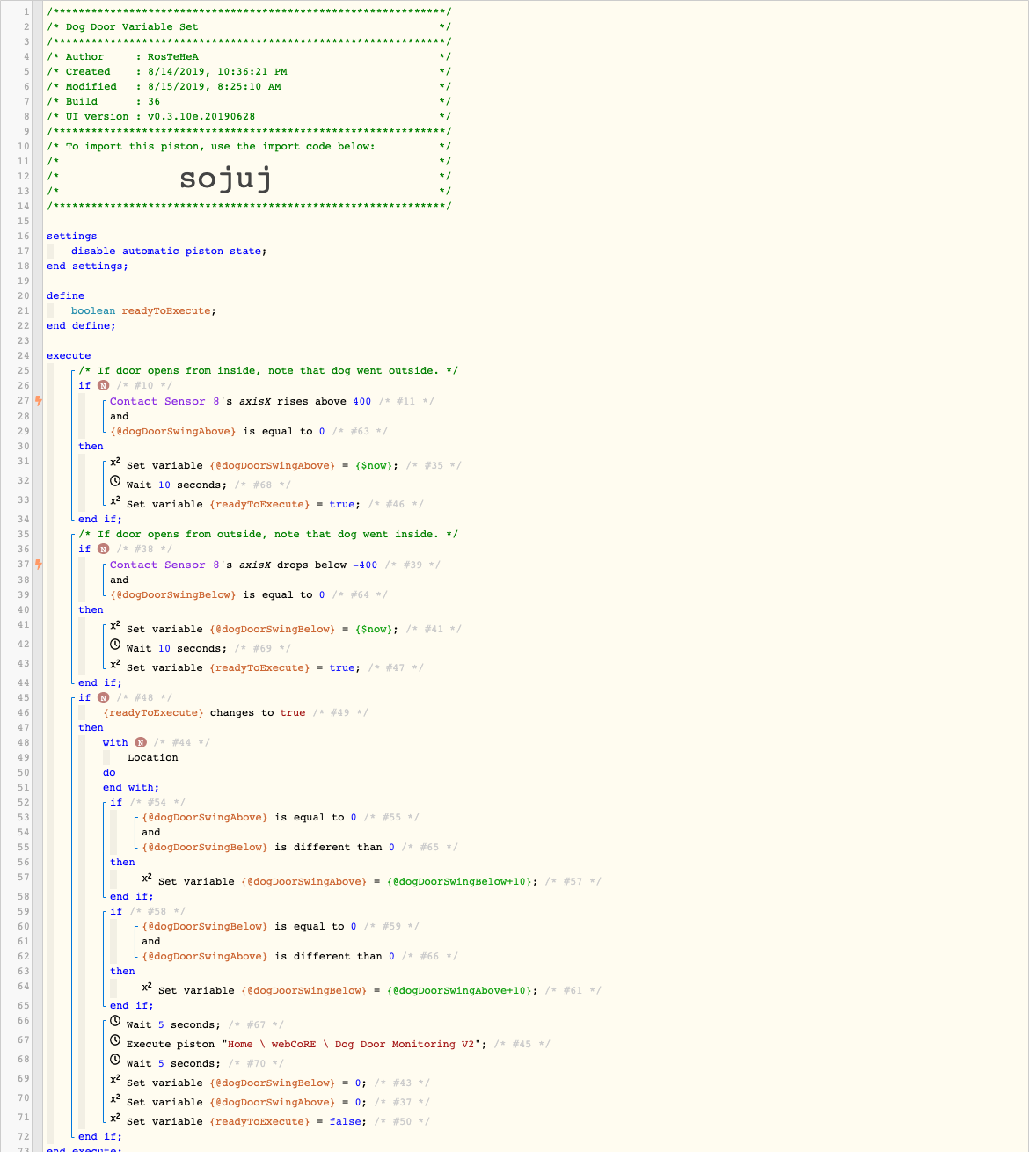
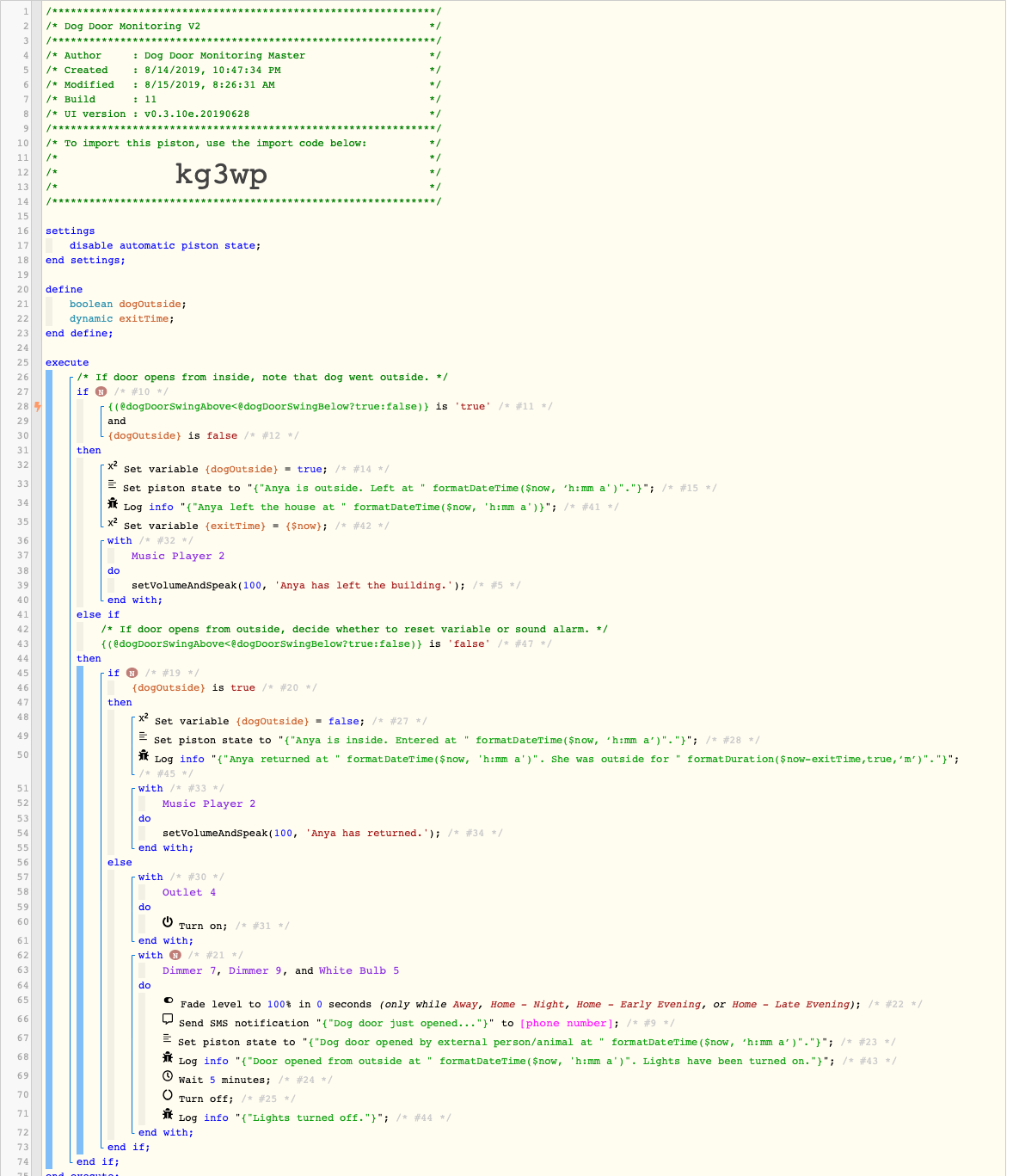
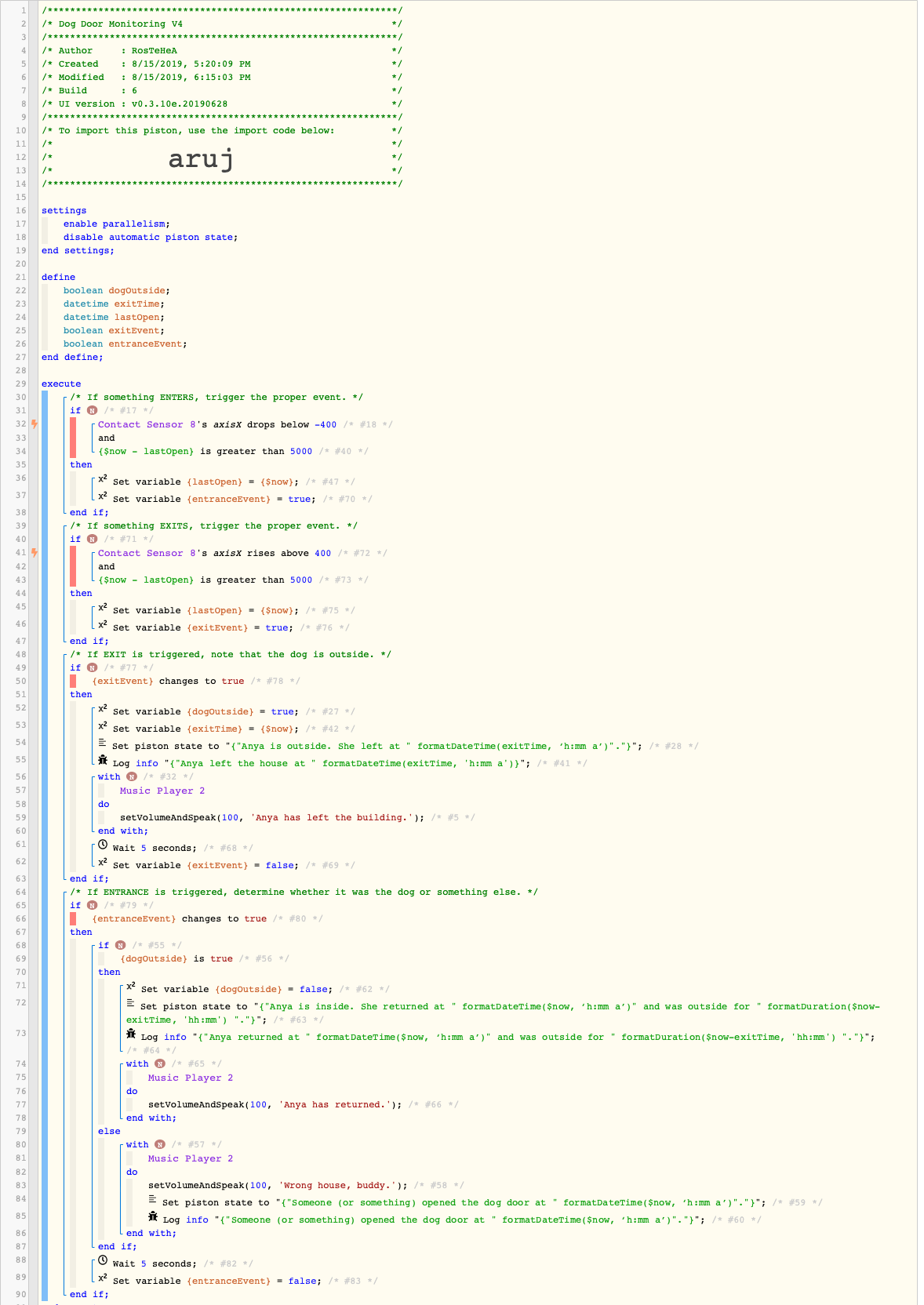
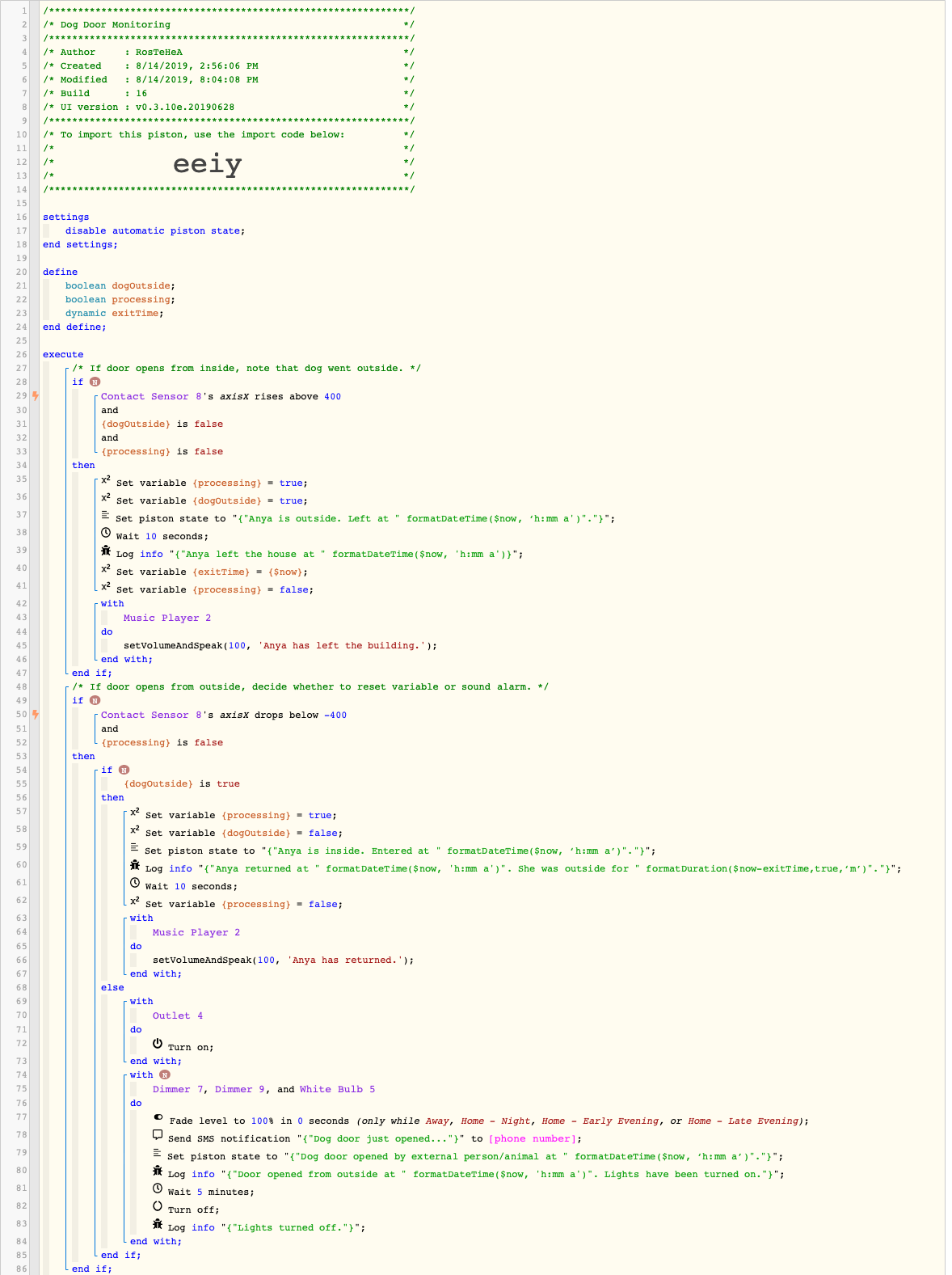
**4) Post a Green Snapshot of the piston!
5) Attach logs after turning logging level to Full
8/14/2019, 8:17:11 PM +173ms
+1ms ╔Received event [Home].time = 1565835419800 with a delay of 11373ms
+141ms ║RunTime Analysis CS > 28ms > PS > 63ms > PE > 49ms > CE
+144ms ║Runtime (49843 bytes) successfully initialized in 63ms (v0.3.10e.20190628) (141ms)
+145ms ║╔Execution stage started
+146ms ║╚Execution stage complete. (1ms)
+147ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:21:24 PM MDT (in 252.902s)
+156ms ╚Event processed successfully (156ms)
8/14/2019, 8:16:59 PM +100ms
+0ms ╔Received event [Home].time = 1565835419800 with a delay of -701ms
+8961ms ║RunTime Analysis CS > 26ms > PS > 8888ms > PE > 48ms > CE
+8962ms ║Piston waited at a semaphore for 8828ms
+8965ms ║Runtime (49916 bytes) successfully initialized in 8888ms (v0.3.10e.20190628) (8964ms)
+8966ms ║╔Execution stage started
+8967ms ║╚Execution stage complete. (1ms)
+8969ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 1s), with 1 more job pending
+8981ms ╚Event processed successfully (8982ms)
8/14/2019, 8:16:57 PM +703ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -78,1041,-123 with a delay of 164ms
+106ms ║RunTime Analysis CS > 20ms > PS > 47ms > PE > 39ms > CE
+109ms ║Runtime (49853 bytes) successfully initialized in 47ms (v0.3.10e.20190628) (106ms)
+109ms ║╔Execution stage started
+117ms ║║Comparison (decimal) -78.0 rises_above (integer) 400 = false (1ms)
+118ms ║║Condition #11 evaluated false (5ms)
+119ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+125ms ║║Comparison (decimal) -78.0 drops_below (integer) -400 = false (0ms)
+126ms ║║Condition #18 evaluated false (5ms)
+127ms ║║Condition group #17 evaluated false (state did not change) (6ms)
+129ms ║║Fast executing schedules, waiting for 1968ms to sync up
+2122ms ║║Executed virtual command setVariable (3ms)
+2125ms ║║Cancelling statement #33's schedules...
+2443ms ║║Executed physical command [Echo - Living Room Dot].setVolumeAndSpeak([100, Anya has returned.]) (310ms)
+2444ms ║║Executed [Echo - Living Room Dot].setVolumeAndSpeak (311ms)
+2446ms ║╚Execution stage complete. (2337ms)
+2447ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:21:24 PM MDT (in 264.071s)
+2459ms ╚Event processed successfully (2459ms)
8/14/2019, 8:16:56 PM +663ms
+2ms ╔Received event [Dryer Sensor].threeAxis = -95,1045,-118 with a delay of 142ms
+97ms ║RunTime Analysis CS > 23ms > PS > 38ms > PE > 36ms > CE
+100ms ║Runtime (49852 bytes) successfully initialized in 38ms (v0.3.10e.20190628) (98ms)
+101ms ║╔Execution stage started
+107ms ║║Comparison (decimal) -95.0 rises_above (integer) 400 = false (1ms)
+108ms ║║Condition #11 evaluated false (4ms)
+109ms ║║Condition group #10 evaluated false (state did not change) (5ms)
+114ms ║║Comparison (decimal) -95.0 drops_below (integer) -400 = false (1ms)
+115ms ║║Condition #18 evaluated false (4ms)
+116ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+118ms ║╚Execution stage complete. (18ms)
+119ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 3.018s), with 1 more job pending
+129ms ╚Event processed successfully (129ms)
8/14/2019, 8:16:55 PM +648ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -85,1043,-119 with a delay of 137ms
+102ms ║RunTime Analysis CS > 23ms > PS > 39ms > PE > 40ms > CE
+105ms ║Runtime (49853 bytes) successfully initialized in 39ms (v0.3.10e.20190628) (103ms)
+106ms ║╔Execution stage started
+113ms ║║Comparison (decimal) -85.0 rises_above (integer) 400 = false (1ms)
+115ms ║║Condition #11 evaluated false (4ms)
+116ms ║║Condition group #10 evaluated false (state did not change) (5ms)
+121ms ║║Comparison (decimal) -85.0 drops_below (integer) -400 = false (1ms)
+122ms ║║Condition #18 evaluated false (4ms)
+123ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+125ms ║╚Execution stage complete. (20ms)
+127ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 4.026s), with 1 more job pending
+140ms ╚Event processed successfully (140ms)
8/14/2019, 8:16:54 PM +645ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -80,1044,-120 with a delay of 143ms
+99ms ║RunTime Analysis CS > 24ms > PS > 40ms > PE > 35ms > CE
+102ms ║Runtime (49853 bytes) successfully initialized in 40ms (v0.3.10e.20190628) (100ms)
+103ms ║╔Execution stage started
+110ms ║║Comparison (decimal) -80.0 rises_above (integer) 400 = false (1ms)
+111ms ║║Condition #11 evaluated false (4ms)
+112ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+117ms ║║Comparison (decimal) -80.0 drops_below (integer) -400 = false (1ms)
+118ms ║║Condition #18 evaluated false (4ms)
+119ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+121ms ║╚Execution stage complete. (18ms)
+122ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 5.033s), with 1 more job pending
+131ms ╚Event processed successfully (131ms)
8/14/2019, 8:16:53 PM +687ms
+2ms ╔Received event [Dryer Sensor].threeAxis = -148,497,-559 with a delay of 208ms
+99ms ║RunTime Analysis CS > 20ms > PS > 43ms > PE > 36ms > CE
+102ms ║Runtime (49852 bytes) successfully initialized in 43ms (v0.3.10e.20190628) (100ms)
+103ms ║╔Execution stage started
+111ms ║║Comparison (decimal) -148.0 rises_above (integer) 400 = false (1ms)
+112ms ║║Condition #11 evaluated false (5ms)
+113ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+119ms ║║Comparison (decimal) -148.0 drops_below (integer) -400 = false (0ms)
+120ms ║║Cancelling condition #18's schedules...
+121ms ║║Condition #18 evaluated false (5ms)
+122ms ║║Condition group #17 evaluated false (state did not change) (6ms)
+124ms ║╚Execution stage complete. (21ms)
+125ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 5.988s), with 1 more job pending
+136ms ╚Event processed successfully (136ms)
8/14/2019, 8:16:52 PM +605ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -782,768,110 with a delay of 134ms
+85ms ║RunTime Analysis CS > 20ms > PS > 31ms > PE > 34ms > CE
+88ms ║Runtime (49851 bytes) successfully initialized in 31ms (v0.3.10e.20190628) (86ms)
+89ms ║╔Execution stage started
+96ms ║║Comparison (decimal) -782.0 rises_above (integer) 400 = false (1ms)
+97ms ║║Condition #11 evaluated false (4ms)
+98ms ║║Condition group #10 evaluated false (state did not change) (5ms)
+108ms ║║Comparison (decimal) -782.0 drops_below (integer) -400 = true (1ms)
+110ms ║║Cancelling condition #18's schedules...
+111ms ║║Condition #18 evaluated true (9ms)
+114ms ║║Comparison (boolean) true is (boolean) false = false (1ms)
+115ms ║║Cancelling condition #40's schedules...
+116ms ║║Condition #40 evaluated false (5ms)
+117ms ║║Condition group #17 evaluated false (state did not change) (17ms)
+120ms ║╚Execution stage complete. (31ms)
+121ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 7.074s), with 1 more job pending
+132ms ╚Event processed successfully (132ms)
8/14/2019, 8:16:51 PM +631ms
+2ms ╔Received event [Dryer Sensor].threeAxis = 106,1016,-466 with a delay of 168ms
+127ms ║RunTime Analysis CS > 28ms > PS > 53ms > PE > 45ms > CE
+129ms ║Runtime (49852 bytes) successfully initialized in 53ms (v0.3.10e.20190628) (126ms)
+130ms ║╔Execution stage started
+138ms ║║Comparison (decimal) 106.0 rises_above (integer) 400 = false (1ms)
+140ms ║║Cancelling condition #11's schedules...
+140ms ║║Condition #11 evaluated false (5ms)
+141ms ║║Condition group #10 evaluated false (state did not change) (7ms)
+147ms ║║Comparison (decimal) 106.0 drops_below (integer) -400 = false (1ms)
+149ms ║║Condition #18 evaluated false (4ms)
+150ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+152ms ║╚Execution stage complete. (22ms)
+154ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 8.016s), with 1 more job pending
+167ms ╚Event processed successfully (167ms)
8/14/2019, 8:16:50 PM +586ms
+1ms ╔Received event [Dryer Sensor].threeAxis = 654,830,-94 with a delay of 138ms
+100ms ║RunTime Analysis CS > 22ms > PS > 41ms > PE > 38ms > CE
+103ms ║Runtime (49850 bytes) successfully initialized in 41ms (v0.3.10e.20190628) (101ms)
+104ms ║╔Execution stage started
+111ms ║║Comparison (decimal) 654.0 rises_above (integer) 400 = true (1ms)
+112ms ║║Cancelling condition #11's schedules...
+113ms ║║Condition #11 evaluated true (5ms)
+117ms ║║Comparison (boolean) false is (boolean) false = true (1ms)
+118ms ║║Condition #12 evaluated true (4ms)
+121ms ║║Comparison (boolean) true is (boolean) false = false (1ms)
+123ms ║║Cancelling condition #39's schedules...
+124ms ║║Condition #39 evaluated false (4ms)
+124ms ║║Condition group #10 evaluated false (state did not change) (17ms)
+130ms ║║Comparison (decimal) 654.0 drops_below (integer) -400 = false (0ms)
+131ms ║║Cancelling condition #18's schedules...
+132ms ║║Condition #18 evaluated false (4ms)
+133ms ║║Cancelling condition #17's schedules...
+133ms ║║Condition group #17 evaluated false (state changed) (7ms)
+136ms ║╚Execution stage complete. (33ms)
+138ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 9.077s), with 1 more job pending
+148ms ╚Event processed successfully (148ms)
8/14/2019, 8:16:49 PM +606ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -975,383,-99 with a delay of 174ms
+102ms ║RunTime Analysis CS > 21ms > PS > 48ms > PE > 34ms > CE
+105ms ║Runtime (49852 bytes) successfully initialized in 48ms (v0.3.10e.20190628) (103ms)
+106ms ║╔Execution stage started
+113ms ║║Comparison (decimal) -975.0 rises_above (integer) 400 = false (1ms)
+114ms ║║Condition #11 evaluated false (4ms)
+115ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+120ms ║║Comparison (decimal) -975.0 drops_below (integer) -400 = true (1ms)
+121ms ║║Cancelling condition #18's schedules...
+122ms ║║Condition #18 evaluated true (5ms)
+125ms ║║Comparison (boolean) false is (boolean) false = true (1ms)
+126ms ║║Condition #40 evaluated true (3ms)
+127ms ║║Cancelling condition #17's schedules...
+128ms ║║Condition group #17 evaluated true (state changed) (11ms)
+133ms ║║Comparison (boolean) true is (boolean) true = true (1ms)
+134ms ║║Cancelling condition #20's schedules...
+135ms ║║Condition #20 evaluated true (5ms)
+136ms ║║Cancelling condition #19's schedules...
+137ms ║║Condition group #19 evaluated true (state changed) (6ms)
+138ms ║║Cancelling statement #26's schedules...
+144ms ║║Executed virtual command setVariable (2ms)
+149ms ║║Executed virtual command setVariable (3ms)
+156ms ║║Calculating (string) Anya is inside. Entered at + (string) 8:16 PM >> (string) Anya is inside. Entered at 8:16 PM
+159ms ║║Calculating (string) Anya is inside. Entered at 8:16 PM + (string) . >> (string) Anya is inside. Entered at 8:16 PM.
+161ms ║║Executed virtual command setState (1ms)
+172ms ║║Calculating (decimal) 1.565835409775E12 - (decimal) 1.565835393317E12 >> (decimal) 16458.0
+178ms ║║Calculating (string) Anya returned at + (string) 8:16 PM >> (string) Anya returned at 8:16 PM
+181ms ║║Calculating (string) Anya returned at 8:16 PM + (string) . She was outside for >> (string) Anya returned at 8:16 PM. She was outside for
+183ms ║║Calculating (string) Anya returned at 8:16 PM. She was outside for + (string) 0 minutes >> (string) Anya returned at 8:16 PM. She was outside for 0 minutes
+185ms ║║Calculating (string) Anya returned at 8:16 PM. She was outside for 0 minutes + (string) . >> (string) Anya returned at 8:16 PM. She was outside for 0 minutes.
+189ms ║║Anya returned at 8:16 PM. She was outside for 0 minutes.
+189ms ║║Executed virtual command log (1ms)
+192ms ║║Executed virtual command wait (0ms)
+193ms ║║Requesting a wake up for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 10.0s)
+198ms ║╚Execution stage complete. (93ms)
+200ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:59 PM MDT (in 9.995s), with 1 more job pending
+208ms ╚Event processed successfully (208ms)
8/14/2019, 8:16:48 PM +702ms
+2ms ╔Received event [Dryer Sensor].threeAxis = -284,853,-409 with a delay of 197ms
+106ms ║RunTime Analysis CS > 21ms > PS > 46ms > PE > 39ms > CE
+109ms ║Runtime (49852 bytes) successfully initialized in 46ms (v0.3.10e.20190628) (107ms)
+110ms ║╔Execution stage started
+118ms ║║Comparison (decimal) -284.0 rises_above (integer) 400 = false (1ms)
+119ms ║║Condition #11 evaluated false (5ms)
+120ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+126ms ║║Comparison (decimal) -284.0 drops_below (integer) -400 = false (1ms)
+128ms ║║Condition #18 evaluated false (5ms)
+129ms ║║Condition group #17 evaluated false (state did not change) (6ms)
+131ms ║╚Execution stage complete. (21ms)
+133ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:21:24 PM MDT (in 275.387s)
+145ms ╚Event processed successfully (145ms)
8/14/2019, 8:16:33 PM +167ms
+1ms ╔Received event [Home].time = 1565835394914 with a delay of -1747ms
+118ms ║RunTime Analysis CS > 27ms > PS > 56ms > PE > 35ms > CE
+122ms ║Runtime (49840 bytes) successfully initialized in 56ms (v0.3.10e.20190628) (119ms)
+123ms ║╔Execution stage started
+143ms ║║Calculating (string) Anya left the house at + (string) 8:16 PM >> (string) Anya left the house at 8:16 PM
+147ms ║║Anya left the house at 8:16 PM
+148ms ║║Executed virtual command log (2ms)
+156ms ║║Executed virtual command setVariable (4ms)
+163ms ║║Executed virtual command setVariable (4ms)
+166ms ║║Cancelling statement #32's schedules...
+438ms ║║Executed physical command [Echo - Living Room Dot].setVolumeAndSpeak([100, Anya has left the building.]) (263ms)
+439ms ║║Executed [Echo - Living Room Dot].setVolumeAndSpeak (265ms)
+448ms ║║Condition #18 evaluated false (7ms)
+449ms ║║Condition group #17 evaluated false (state did not change) (8ms)
+452ms ║╚Execution stage complete. (328ms)
+453ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:21:24 PM MDT (in 290.602s)
+465ms ╚Event processed successfully (465ms)
8/14/2019, 8:16:30 PM +837ms
+2ms ╔Received event [Dryer Sensor].threeAxis = -88,1045,-121 with a delay of 140ms
+105ms ║RunTime Analysis CS > 26ms > PS > 46ms > PE > 33ms > CE
+108ms ║Runtime (49851 bytes) successfully initialized in 46ms (v0.3.10e.20190628) (105ms)
+109ms ║╔Execution stage started
+116ms ║║Comparison (decimal) -88.0 rises_above (integer) 400 = false (0ms)
+117ms ║║Condition #11 evaluated false (4ms)
+118ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+123ms ║║Comparison (decimal) -88.0 drops_below (integer) -400 = false (1ms)
+124ms ║║Condition #18 evaluated false (4ms)
+125ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+127ms ║╚Execution stage complete. (18ms)
+129ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 3.949s), with 1 more job pending
+139ms ╚Event processed successfully (139ms)
8/14/2019, 8:16:29 PM +793ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -99,1044,-122 with a delay of 114ms
+73ms ║RunTime Analysis CS > 14ms > PS > 28ms > PE > 31ms > CE
+76ms ║Runtime (49850 bytes) successfully initialized in 28ms (v0.3.10e.20190628) (74ms)
+77ms ║╔Execution stage started
+84ms ║║Comparison (decimal) -99.0 rises_above (integer) 400 = false (1ms)
+85ms ║║Condition #11 evaluated false (4ms)
+86ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+91ms ║║Comparison (decimal) -99.0 drops_below (integer) -400 = false (1ms)
+93ms ║║Condition #18 evaluated false (4ms)
+94ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+96ms ║╚Execution stage complete. (19ms)
+97ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 5.024s), with 1 more job pending
+110ms ╚Event processed successfully (110ms)
8/14/2019, 8:16:28 PM +807ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -87,1041,-133 with a delay of 148ms
+77ms ║RunTime Analysis CS > 19ms > PS > 30ms > PE > 28ms > CE
+80ms ║Runtime (49851 bytes) successfully initialized in 30ms (v0.3.10e.20190628) (77ms)
+80ms ║╔Execution stage started
+88ms ║║Comparison (decimal) -87.0 rises_above (integer) 400 = false (1ms)
+89ms ║║Condition #11 evaluated false (4ms)
+90ms ║║Condition group #10 evaluated false (state did not change) (6ms)
+95ms ║║Comparison (decimal) -87.0 drops_below (integer) -400 = false (1ms)
+97ms ║║Condition #18 evaluated false (5ms)
+98ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+100ms ║╚Execution stage complete. (20ms)
+102ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 6.006s), with 1 more job pending
+112ms ╚Event processed successfully (112ms)
8/14/2019, 8:16:27 PM +959ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -158,1050,-121 with a delay of 311ms
+74ms ║RunTime Analysis CS > 19ms > PS > 28ms > PE > 27ms > CE
+77ms ║Runtime (49852 bytes) successfully initialized in 28ms (v0.3.10e.20190628) (74ms)
+77ms ║╔Execution stage started
+84ms ║║Comparison (decimal) -158.0 rises_above (integer) 400 = false (1ms)
+86ms ║║Condition #11 evaluated false (5ms)
+87ms ║║Condition group #10 evaluated false (state did not change) (5ms)
+93ms ║║Comparison (decimal) -158.0 drops_below (integer) -400 = false (1ms)
+95ms ║║Condition #18 evaluated false (4ms)
+96ms ║║Condition group #17 evaluated false (state did not change) (5ms)
+98ms ║╚Execution stage complete. (21ms)
+100ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 6.856s), with 1 more job pending
+110ms ╚Event processed successfully (109ms)
8/14/2019, 8:16:26 PM +785ms
+2ms ╔Received event [Dryer Sensor].threeAxis = -298,969,-123 with a delay of 153ms
+104ms ║RunTime Analysis CS > 21ms > PS > 49ms > PE > 34ms > CE
+107ms ║Runtime (49851 bytes) successfully initialized in 49ms (v0.3.10e.20190628) (104ms)
+108ms ║╔Execution stage started
+115ms ║║Comparison (decimal) -298.0 rises_above (integer) 400 = false (1ms)
+117ms ║║Condition #11 evaluated false (4ms)
+117ms ║║Condition group #10 evaluated false (state did not change) (5ms)
+123ms ║║Comparison (decimal) -298.0 drops_below (integer) -400 = false (1ms)
+124ms ║║Condition #18 evaluated false (4ms)
+125ms ║║Condition group #17 evaluated false (state did not change) (6ms)
+127ms ║╚Execution stage complete. (19ms)
+129ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 8.001s), with 1 more job pending
+140ms ╚Event processed successfully (140ms)
8/14/2019, 8:16:25 PM +772ms
+2ms ╔Received event [Dryer Sensor].threeAxis = 524,1699,-784 with a delay of 157ms
+107ms ║RunTime Analysis CS > 27ms > PS > 50ms > PE > 30ms > CE
+110ms ║Runtime (49847 bytes) successfully initialized in 50ms (v0.3.10e.20190628) (107ms)
+111ms ║╔Execution stage started
+117ms ║║Comparison (decimal) 524.0 rises_above (integer) 400 = false (1ms)
+118ms ║║Cancelling condition #11's schedules...
+119ms ║║Condition #11 evaluated false (5ms)
+120ms ║║Cancelling condition #10's schedules...
+121ms ║║Condition group #10 evaluated false (state changed) (6ms)
+125ms ║║Comparison (decimal) 524.0 drops_below (integer) -400 = false (1ms)
+126ms ║║Cancelling condition #18's schedules...
+127ms ║║Condition #18 evaluated false (4ms)
+128ms ║║Cancelling condition #17's schedules...
+129ms ║║Condition group #17 evaluated false (state changed) (7ms)
+131ms ║╚Execution stage complete. (20ms)
+133ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 9.01s), with 1 more job pending
+144ms ╚Event processed successfully (144ms)
8/14/2019, 8:16:24 PM +761ms
+1ms ╔Received event [Dryer Sensor].threeAxis = 787,455,-65 with a delay of 159ms
+102ms ║RunTime Analysis CS > 26ms > PS > 47ms > PE > 30ms > CE
+105ms ║Runtime (49890 bytes) successfully initialized in 47ms (v0.3.10e.20190628) (103ms)
+106ms ║╔Execution stage started
+112ms ║║Comparison (decimal) 787.0 rises_above (integer) 400 = true (1ms)
+114ms ║║Cancelling condition #11's schedules...
+114ms ║║Condition #11 evaluated true (5ms)
+118ms ║║Comparison (boolean) false is (boolean) false = true (1ms)
+119ms ║║Condition #12 evaluated true (4ms)
+122ms ║║Comparison (boolean) false is (boolean) false = true (1ms)
+124ms ║║Condition #39 evaluated true (3ms)
+125ms ║║Cancelling condition #10's schedules...
+125ms ║║Condition group #10 evaluated true (state changed) (16ms)
+127ms ║║Cancelling statement #13's schedules...
+132ms ║║Executed virtual command setVariable (3ms)
+137ms ║║Executed virtual command setVariable (2ms)
+144ms ║║Calculating (string) Anya is outside. Left at + (string) 8:16 PM >> (string) Anya is outside. Left at 8:16 PM
+147ms ║║Calculating (string) Anya is outside. Left at 8:16 PM + (string) . >> (string) Anya is outside. Left at 8:16 PM.
+149ms ║║Executed virtual command setState (1ms)
+152ms ║║Executed virtual command wait (0ms)
+153ms ║║Requesting a wake up for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 10.0s)
+157ms ║╚Execution stage complete. (51ms)
+159ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:16:34 PM MDT (in 9.995s), with 1 more job pending
+171ms ╚Event processed successfully (172ms)
8/14/2019, 8:16:23 PM +837ms
+1ms ╔Received event [Dryer Sensor].threeAxis = -494,1050,-432 with a delay of 171ms
+73ms ║RunTime Analysis CS > 15ms > PS > 32ms > PE > 26ms > CE
+76ms ║Runtime (49852 bytes) successfully initialized in 32ms (v0.3.10e.20190628) (74ms)
+77ms ║╔Execution stage started
+86ms ║║Comparison (decimal) -494.0 rises_above (integer) 400 = false (1ms)
+88ms ║║Condition #11 evaluated false (6ms)
+89ms ║║Condition group #10 evaluated false (state did not change) (7ms)
+95ms ║║Comparison (decimal) -494.0 drops_below (integer) -400 = true (0ms)
+96ms ║║Cancelling condition #18's schedules...
+97ms ║║Condition #18 evaluated true (6ms)
+101ms ║║Comparison (boolean) false is (boolean) false = true (2ms)
+102ms ║║Cancelling condition #40's schedules...
+103ms ║║Condition #40 evaluated true (5ms)
+104ms ║║Cancelling condition #17's schedules...
+105ms ║║Condition group #17 evaluated true (state changed) (14ms)
+110ms ║║Comparison (boolean) false is (boolean) true = false (1ms)
+112ms ║║Condition #20 evaluated false (5ms)
+113ms ║║Condition group #19 evaluated false (state did not change) (5ms)
+115ms ║║Cancelling statement #30's schedules...
+128ms ║║Executed physical command [Main Floor Camera Outlet].on() (9ms)
+129ms ║║Executed [Main Floor Camera Outlet].on (11ms)
+131ms ║║Cancelling statement #21's schedules...
+174ms ║║Executed physical command [Dining Room Chandelier].setLevel([100]) (31ms)
+175ms ║║Executed virtual command [Dining Room Chandelier].fadeLevel (38ms)
+247ms ║║Executed physical command [Main Back Patio].setLevel([100]) (67ms)
+248ms ║║Executed virtual command [Main Back Patio].fadeLevel (71ms)
+328ms ║║Executed physical command [Main Kitchen Lights].setLevel([100]) (74ms)
+329ms ║║Executed virtual command [Main Kitchen Lights].fadeLevel (79ms)
+344ms ║║Executed virtual command [Dining Room Chandelier, Main Back Patio, Main Kitchen Lights].sendSMSNotification (10ms)
+357ms ║║Calculating (string) Dog door opened by external person/animal at + (string) 8:16 PM >> (string) Dog door opened by external person/animal at 8:16 PM
+360ms ║║Calculating (string) Dog door opened by external person/animal at 8:16 PM + (string) . >> (string) Dog door opened by external person/animal at 8:16 PM.
+362ms ║║Executed virtual command [Dining Room Chandelier, Main Back Patio, Main Kitchen Lights].setState (1ms)
+372ms ║║Calculating (string) Door opened from outside at + (string) 8:16 PM >> (string) Door opened from outside at 8:16 PM
+375ms ║║Calculating (string) Door opened from outside at 8:16 PM + (string) . Lights have been turned on. >> (string) Door opened from outside at 8:16 PM. Lights have been turned on.
+378ms ║║Door opened from outside at 8:16 PM. Lights have been turned on.
+379ms ║║Executed virtual command [Dining Room Chandelier, Main Back Patio, Main Kitchen Lights].log (1ms)
+383ms ║║Executed virtual command [Dining Room Chandelier, Main Back Patio, Main Kitchen Lights].wait (0ms)
+384ms ║║Requesting a wake up for Wed, Aug 14 2019 @ 8:21:24 PM MDT (in 300.0s)
+388ms ║╚Execution stage complete. (311ms)
+390ms ║Setting up scheduled job for Wed, Aug 14 2019 @ 8:21:24 PM MDT (in 299.995s)
+396ms ╚Event processed successfully (396ms)
8/14/2019, 8:09:40 PM +132ms
+368ms ║Lights turned off.
8/14/2019, 8:04:54 PM +138ms
+8427ms ║Piston waited at a semaphore for 8266ms
8/14/2019, 8:04:52 PM +198ms
+2049ms ║Anya left the house at 8:04 PM
8/14/2019, 8:04:41 PM +14ms
+197ms ║Door opened from outside at 8:04 PM. Lights have been turned on.
8/14/2019, 8:04:13 PM +43ms
+168ms ║Anya returned at 8:04 PM. She was outside for 12 minutes.