1) Give a description of the problem
The SmartThings multisensor acceleration sensor is notorious for phantom alerts. I have one resting on top of doorbell chime. I’d like to change the trigger from ‘acceleration changes’ to something like ‘any of the x,y, or z axis changes by a value of 100 or more’. If I choose x axis in Webcore there are comparisons for absolute values, but not for deltas so I can’t figure out how to set a minimum value.
How do you recommend to detect a change of 100 or more in any direction?
2) What is the expected behavior?
Detect acceleration but ignore the phantom events.
3) What is happening/not happening?
The sensor is notorious for detecting acceleration that isn’t there. Would like to add a threshold.
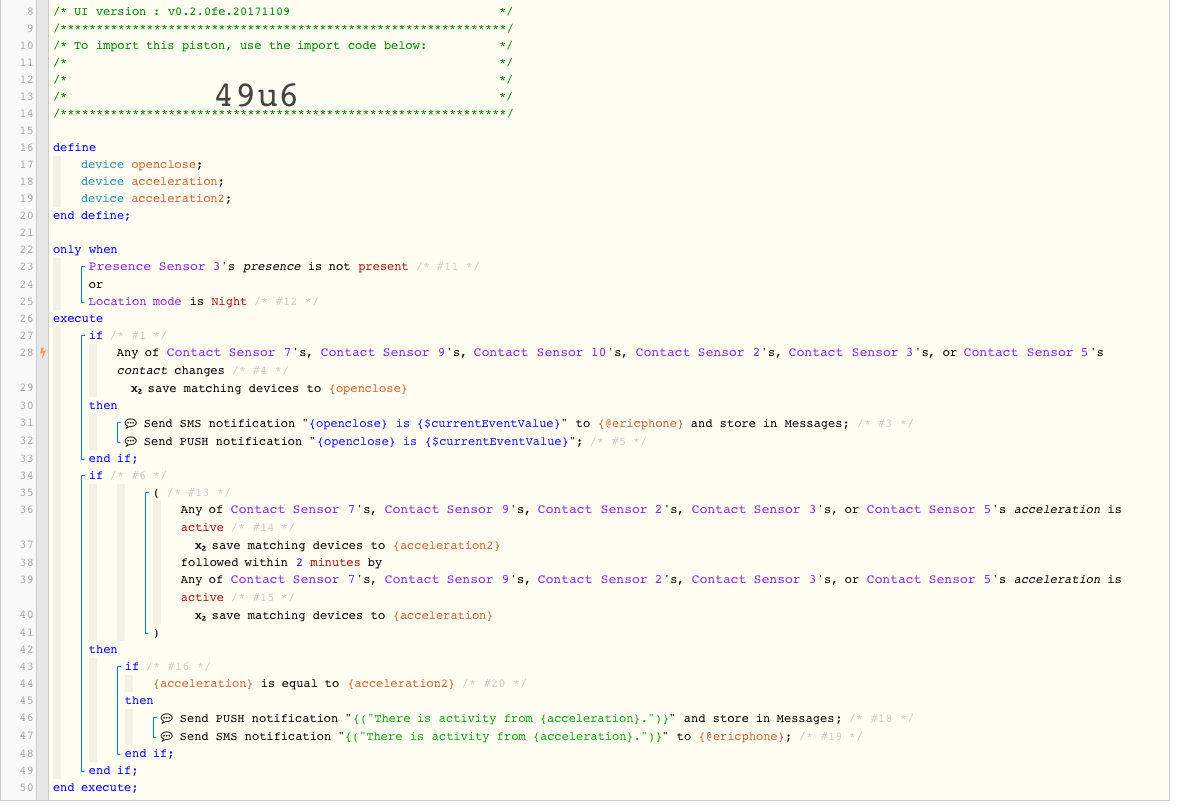
**4) Post a Green Snapshot of the piston!