1) Give a description of the problem
Corner Lamp not turning off after WAIT
2) What is the expected behavior?
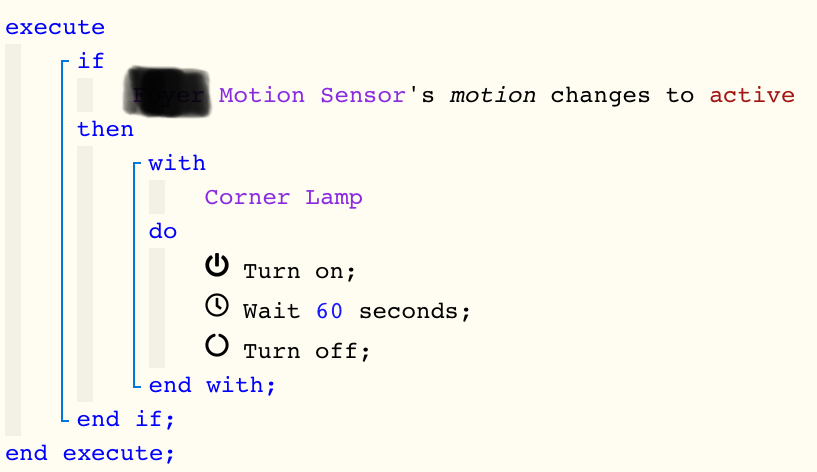
- Motion sensor turns on corner lamp
- 60 seconds elapse
- Corner lamp turns off
3) What is happening/not happening?
- Works correctly
- Logs show 60 seconds elapsing
- Corner lamp stays on, log shows no command sent to turn it off
**4) Post a Green Snapshot of the piston
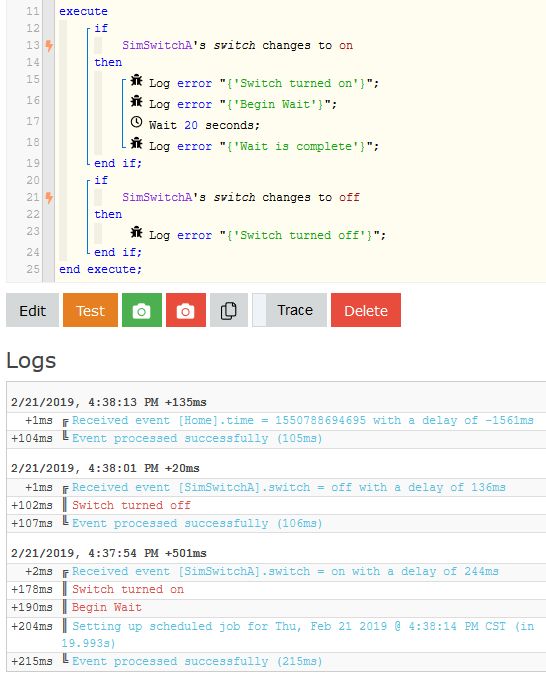
5) Attach any logs (From ST IDE and by turning logging level to Full)
(PASTE YOUR LOGS HERE BETWEEN THE MARKS THEN HIGHLIGHT ALL OF THE LOGS SND CLICK ON THE < 2/20/2019, 8:07:11 AM +125ms
| +0ms | ╔Received event [Myhub].time = 1550668032010 with a delay of -886ms |
|---|---|
| +165ms | ║RunTime Analysis CS > 20ms > PS > 129ms > PE > 17ms > CE |
| +168ms | ║Runtime (39606 bytes) successfully initialized in 129ms (v0.3.109.20181207) (167ms) |
| +169ms | ║╔Execution stage started |
| +171ms | ║╚Execution stage complete. (1ms) |
| +172ms | ╚Event processed successfully (172ms) |
| 2/20/2019, 8:06:15 AM +602ms | |
| +1ms | ╔Received event [F-Motion Sensor].motion = inactive with a delay of 972ms |
| +125ms | ║RunTime Analysis CS > 15ms > PS > 97ms > PE > 13ms > CE |
| +127ms | ║Runtime (39605 bytes) successfully initialized in 97ms (v0.3.109.20181207) (125ms) |
| +129ms | ║╔Execution stage started |
| +139ms | ║║Comparison (enum) inactive changes_to (string) active = false (1ms) |
| +141ms | ║║Cancelling condition #2’s schedules… |
| +143ms | ║║Condition #2 evaluated false (7ms) |
| +144ms | ║║Cancelling condition #1’s schedules… |
| +145ms | ║║Condition group #1 evaluated false (state changed) (10ms) |
| +148ms | ║╚Execution stage complete. (20ms) |
| +150ms | ╚Event processed successfully (149ms) |
| 2/20/2019, 8:06:11 AM +558ms | |
| +2ms | ╔Received event [F-Motion Sensor].motion = active with a delay of 1010ms |
| +303ms | ║RunTime Analysis CS > 28ms > PS > 259ms > PE > 15ms > CE |
| +305ms | ║Runtime (39613 bytes) successfully initialized in 259ms (v0.3.109.20181207) (302ms) |
| +306ms | ║╔Execution stage started |
| +317ms | ║║Comparison (enum) active changes_to (string) active = true (1ms) |
| +319ms | ║║Cancelling condition #2’s schedules… |
| +320ms | ║║Condition #2 evaluated true (8ms) |
| +322ms | ║║Cancelling condition #1’s schedules… |
| +323ms | ║║Condition group #1 evaluated true (state changed) (11ms) |
| +326ms | ║║Cancelling statement #3’s schedules… |
| +443ms | ║║Executed physical command [Corner Lamp].on() (113ms) |
| +444ms | ║║Executed [Corner Lamp].on (115ms) |
| +449ms | ║║Executed virtual command [Corner Lamp].wait (1ms) |
| +451ms | ║║Requesting a wake up for Wed, Feb 20 2019 @ 8:07:12 AM EST (in 60.0s) |
| +457ms | ║╚Execution stage complete. (150ms) |
| +459ms | ║Setting up scheduled job for Wed, Feb 20 2019 @ 8:07:12 AM EST (in 59.994s) |
| +469ms | ╚Event processed successfully (468ms) |
REMOVE BELOW AFTER READING
If a solution is found for your question then please mark the post as the solution.
 )
)