
1) Give a description of the problem
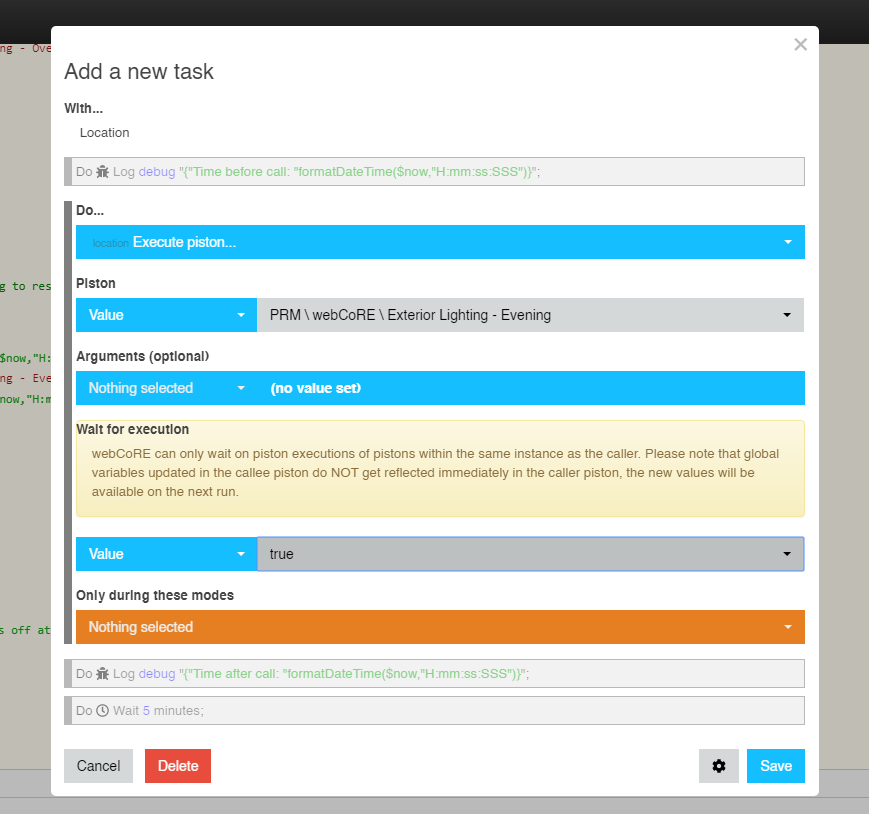
Piston A includes an Execute Piston action to call Piston B. I have “Wait for execution” set to true
2) What is the expected behaviour?
Piston A should wait until Piston B is done whatever it’s doing
3) What is happening/not happening?
Piston A continues on it’s merry way without waiting
**4) Post a Green Snapshot of the piston![image|45x37]
5) Attach logs after turning logging level to Full
Very minimal, but I logged time right before, and right after the execution of Piston B. Piston B most definitely takes more than 263 milliseconds to run as it has a couple waits in it.
3/11/2020, 8:08:59 AM +151ms
+191ms ║Time before call: 8:08:59:336
+454ms ║Time after call: 8:08:59:599
Does this feature simply not work?