1) Give a description of the problem
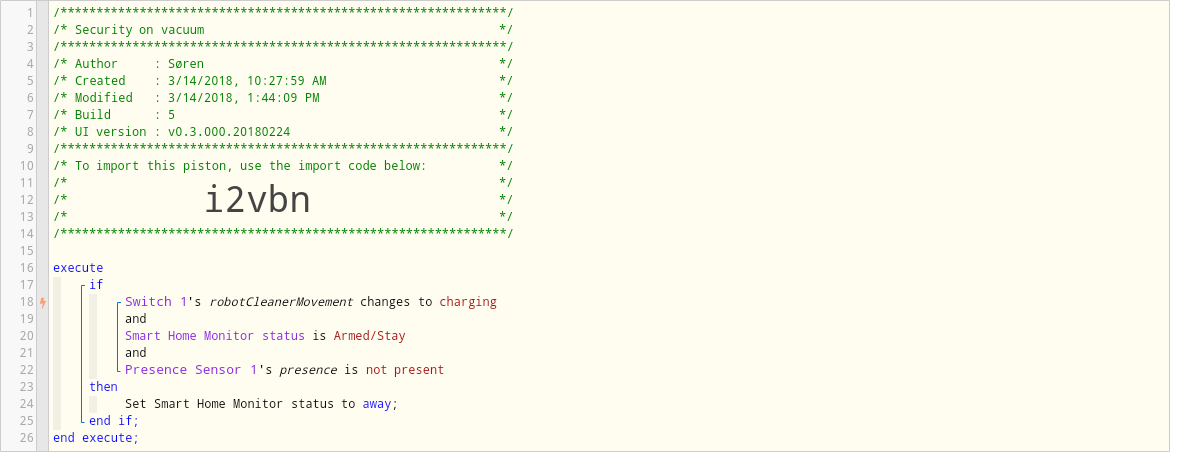
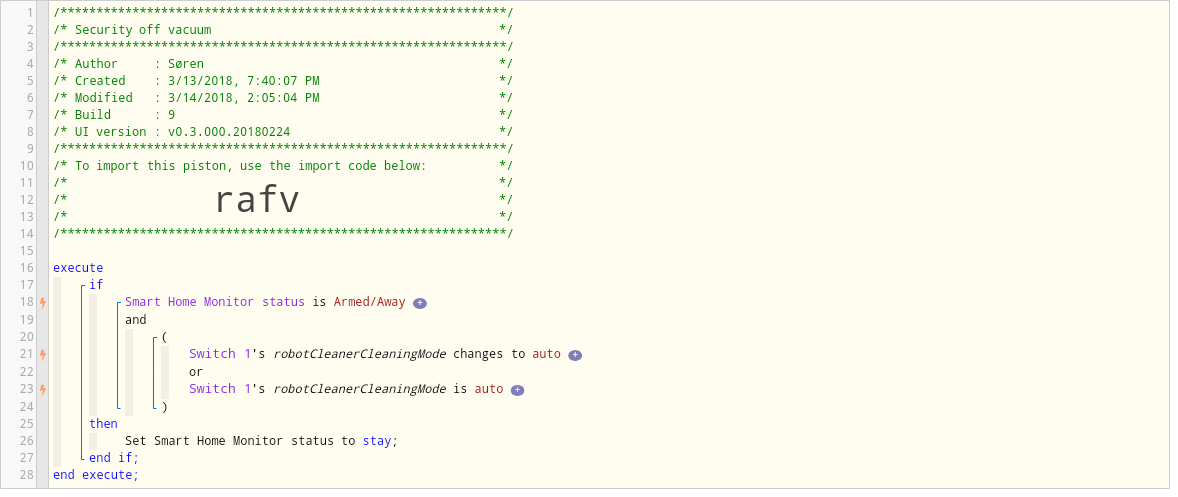
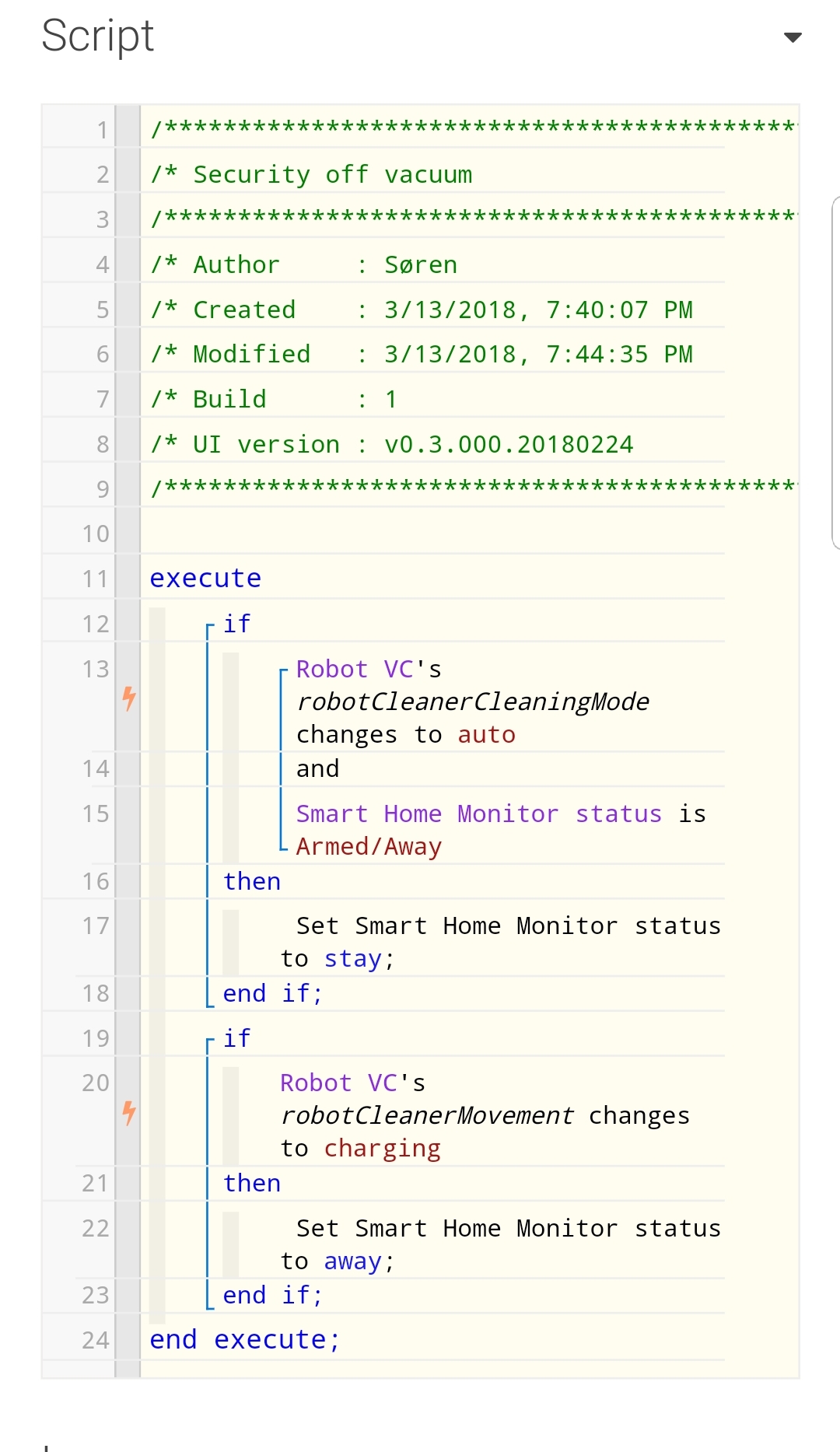
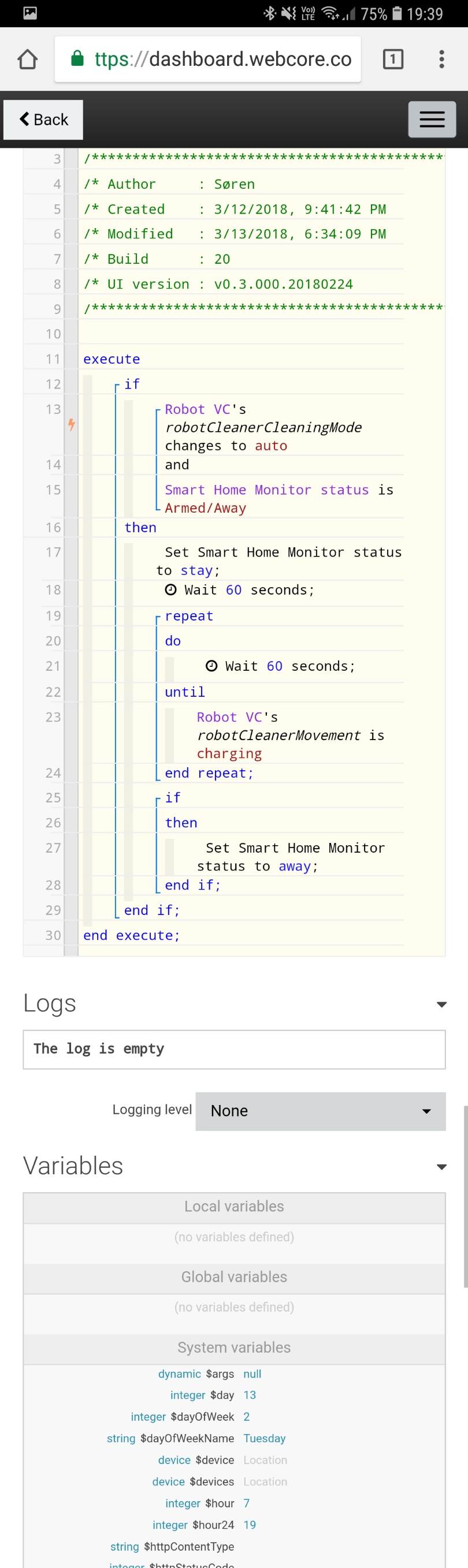
I want the smart home monitor to change from armed away to armed stay, when my robot vacuum starts cleaning. When it is done and returns to the charger I want it to change to armed away again.
2) What is the expected behavior?
*3) What is happening/not happening?
I can make it change to armed stay but not back to armed away.
I tried a simple solution and later tried with a repeater and a wait function. No luck.
(I am new at making pistons)
**4) Post a Green Snapshot of the piston!
5) Attach any logs (From ST IDE and by turning logging level to Full)
(PASTE YOUR LOGS HERE BETWEEN THE MARKS THEN HIGHLIGHT ALL OF THE LOGS SND CLICK ON THE </> ICON TO FORMAT THEM)
REMOVE BELOW AFTER READING
If a solution is found for your question then please mark the post as the solution.