
1) Give a description of the problem
Trying to do something that I think is super standard, and yet I have been battling with the task cancellation policies (TCP) for a few days now.
2) What is the expected behaviour?
I would like a light to turn on upon a motion trigger, and stay on for X minutes regardless of when the motion stops (I am assuming here that the motion will stop earlier than the X minutes). I would also like the light to stay on in case conditions change, e.g. if I switch off and on the light, or if I change the dimmer level.
3) What is happening/not happening?
If I leave the TCP as standard, then the light will never switch off. Indeed, after the “wait”, the task will not continue because the motion condition is no longer true.
If I set the TCP to “never”, then the light will switch off, but it will do so regardless of whether I acted on the light as explained above (e.g. having physically changed the light level) or not.
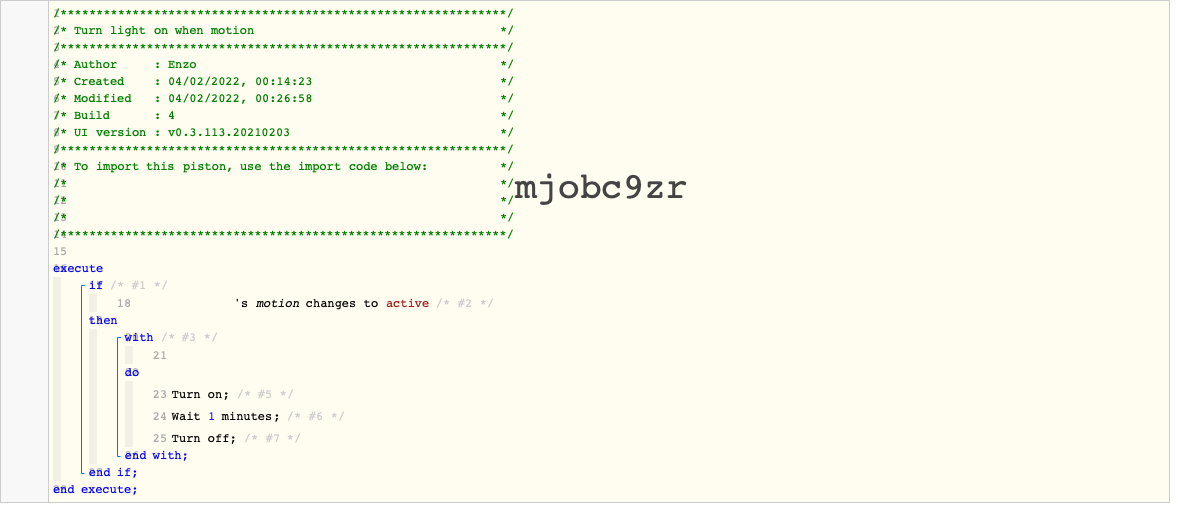
**4) Post a Green Snapshot of the piston!
5) Attach logs after turning logging level to Full
+1ms ╔Starting piston... (v0.3.113.20210203)
+657ms ║╔Subscribing to devices...
+687ms ║║Subscribing to Entrance motion sensor.motion...
+755ms ║║Subscribing to Downlight entrance SW...
+756ms ║╚Finished subscribing (111ms)
+797ms ╚Piston successfully started (797ms)