Sorry for the late response, I was in “New Years Mode” when you guys posted your reply.
Happy New Year!
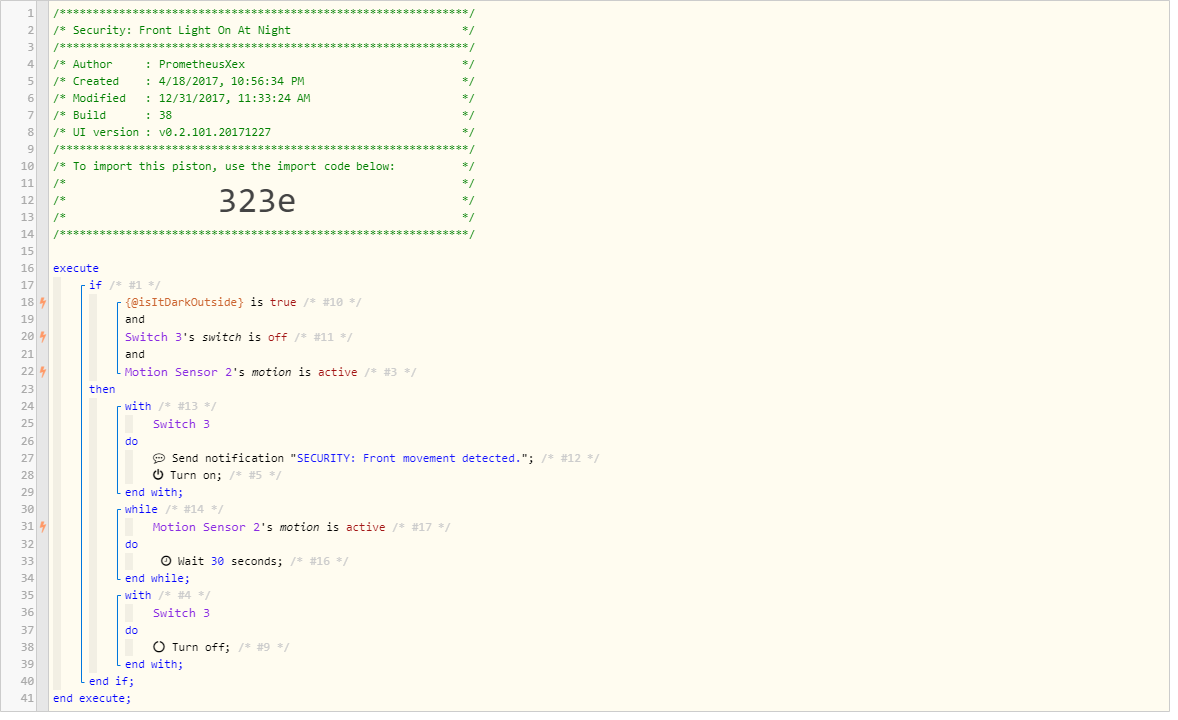
So… what I’m trying to do is if there’s movement detected, the piston is supposed to sit there and wait until there’s no movement, hence the WHILE loop. I’ve used this WHILE loop in other pistons and have got the result I was expecting.
What I’m noticing this morning in testing is the motion is only active for 30 seconds, which is well within my loop actually finishing one cycle. BUT nothing happens when motion ceases. I believe the piston exits because the initial conditions no longer exist.
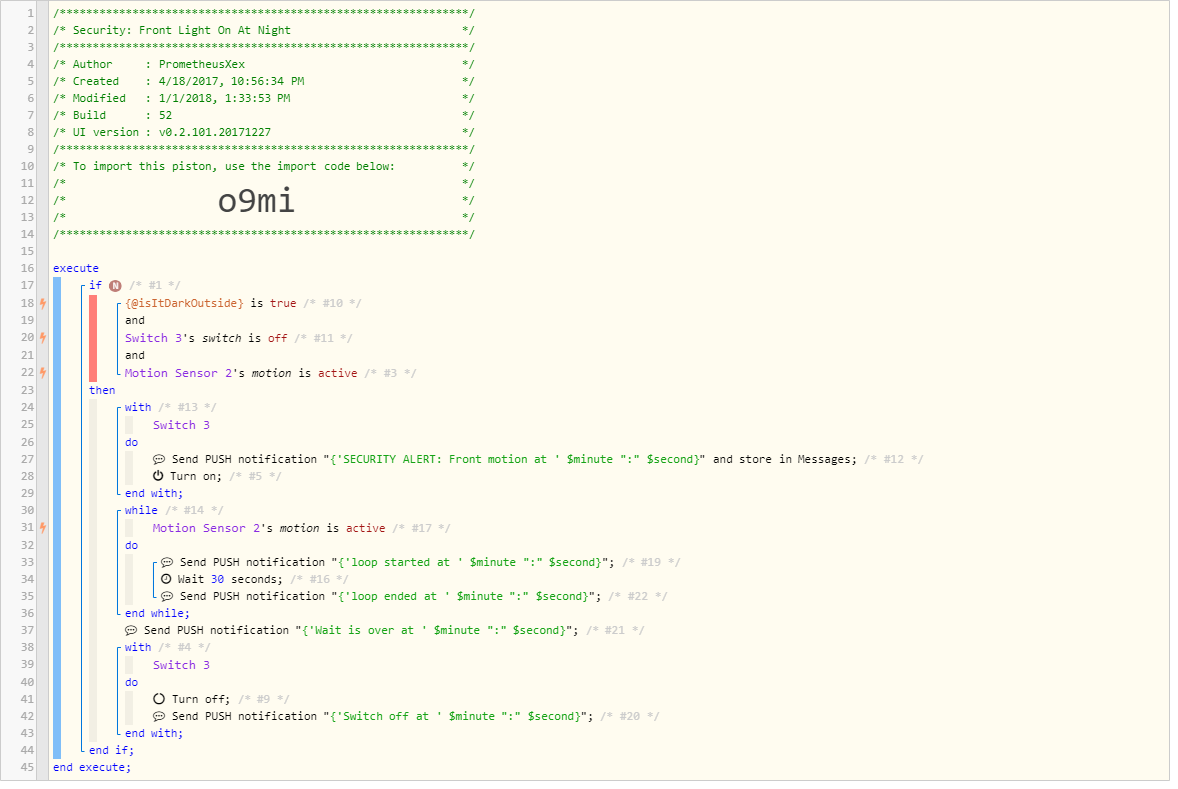
I thought that if I made TASK CANCELLATION POLICY in the IF statement to NEVER, then once the IF is running, it will go though all statements within it all the way to the bottom. It’s not. Everything is skipped once motion stops. I must be setting this the wrong way.
Here is the modded piston. I only get the initial “security started” message, the “loop started” message… then that’s it.