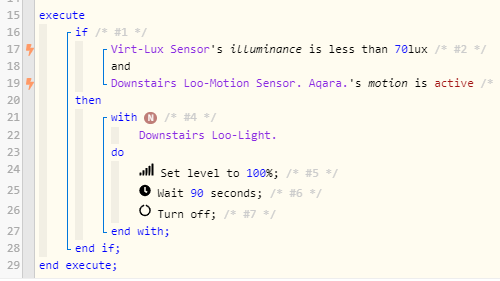
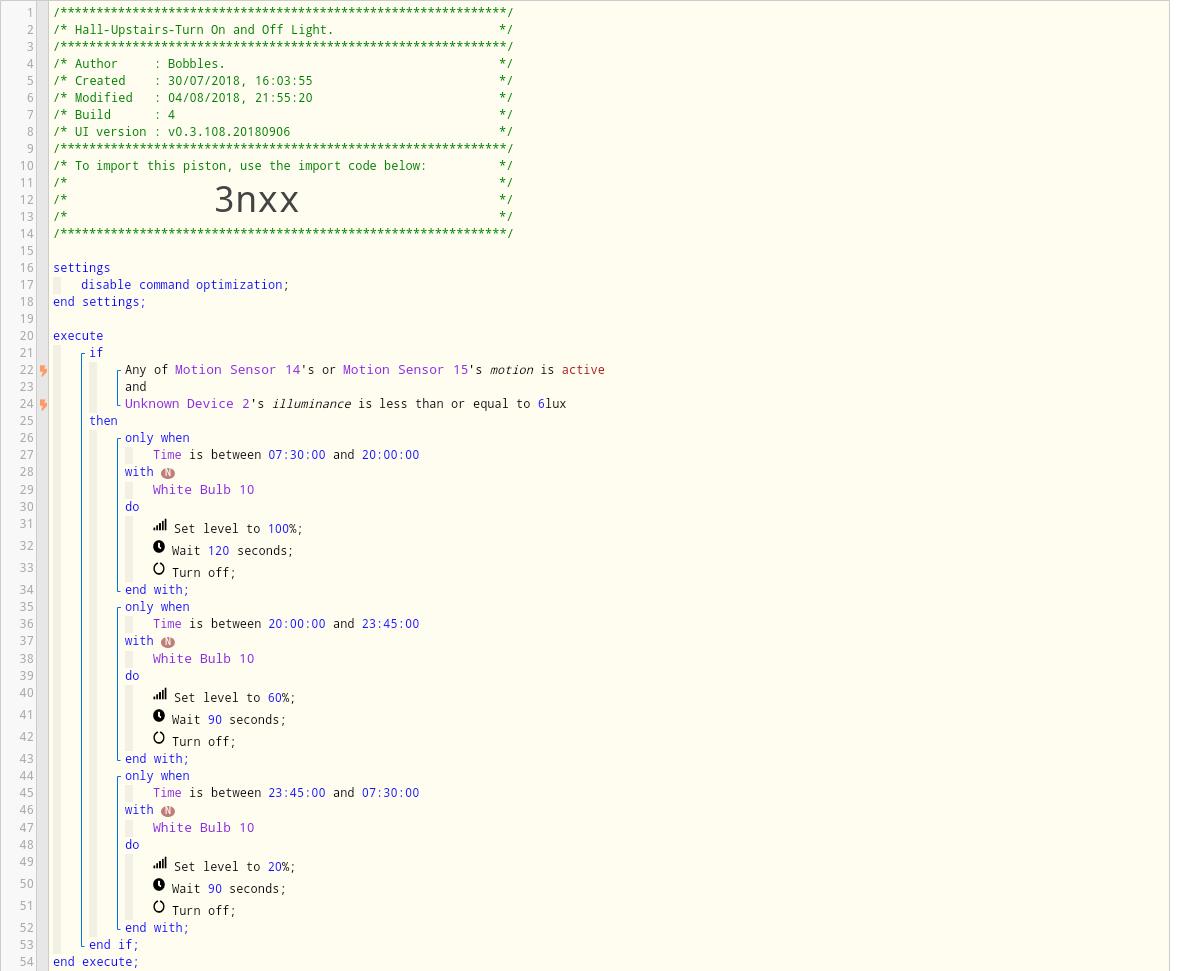
Hi, looking for some help with this piston - mainly the lower part when Location mode is Night.
RGB bulb 2 is LIFX bulb fitted in a lamp.
White bulb 1 is Fibaro Dimmer 2 module for the main ceiling light
RGB bulb 3 is LIFX LED strip around the TV
Everything works between the set times and location modes, apart from the RGB2 light.
When location mode is ‘Night’, It comes on with motion as expected, but won’t switch off again after the 30 second wait. The light should switch off after 30 seconds.
Should this work OK, or do I need to restructure the flow of the piston?

Thanks, Chris

 , how TCP works.
, how TCP works.