1) Give a description of the problem
I have a piston which looks at the motion sensor’s activity.
When it goes into inactive it is set to wait 60 seconds to turn off the light that was previously on.
This assures that if there is motion again within these 60 seconds, the piston will stop executing and start again when the motion is inactive so that the light stays on until I am gone.
Maybe the way I am handling this isn’t the best way to accomplish what I want to do?
2) What is the expected behavior?
Turn off the light if below steps are completed:
- motion changes to inactive
- wait 60 seconds
3) What is happening/not happening?
Piston stops before 60sec wait ends. Even though there was no new motion.
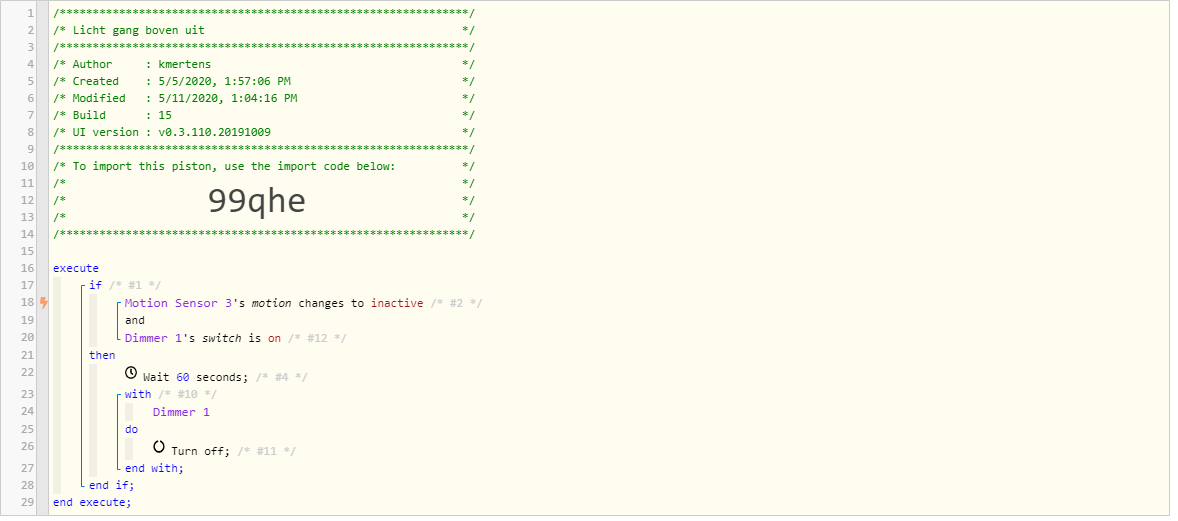
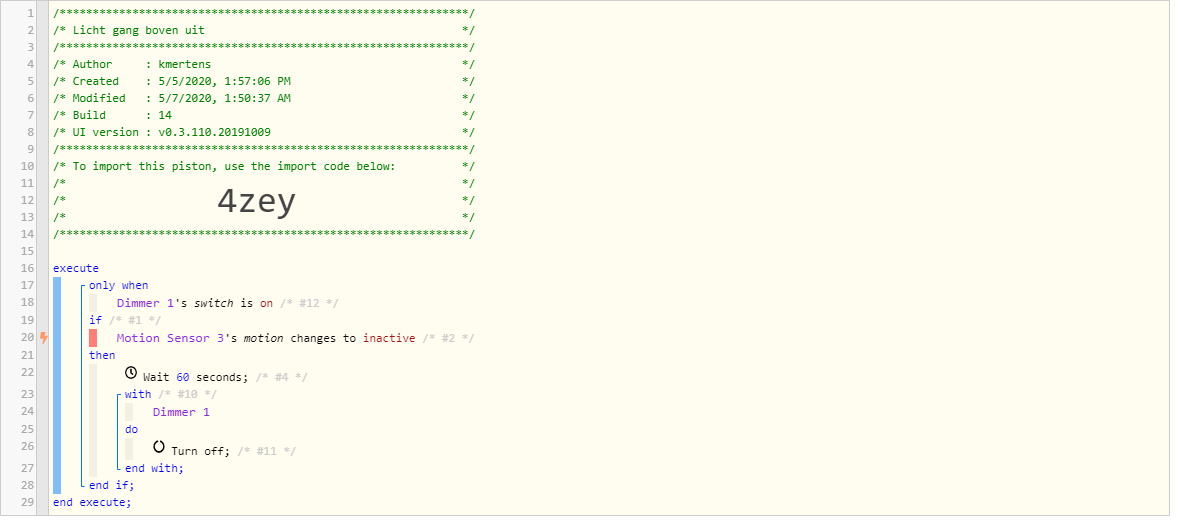
4) Post a Green Snapshot of the piston
5) Attach logs after turning logging level to Full
5/11/2020, 10:13:49 AM +430ms
+1ms ╔Received event [Sensor Hal Boven].motion = inactive with a delay of 68ms
+227ms ║RunTime Analysis CS > 18ms > PS > 137ms > PE > 71ms > CE
+229ms ║Runtime (38700 bytes) successfully initialized in 137ms (v0.3.110.20191009) (227ms)
+230ms ║╔Execution stage started
+243ms ║║Comparison (enum) on is (string) on = true (2ms)
+245ms ║║Cancelling condition #12’s schedules…
+246ms ║║Condition #12 evaluated true (10ms)
+247ms ║║Cancelling condition #1’s schedules…
+248ms ║║Condition group #1 evaluated true (state changed) (12ms)
+252ms ║║Comparison (enum) inactive changes_to (string) inactive = false (0ms)
+254ms ║║Cancelling condition #2’s schedules…
+255ms ║║Condition #2 evaluated false (6ms)
+256ms ║║Cancelling condition #1’s schedules…
+257ms ║║Condition group #1 evaluated false (state changed) (8ms)
+259ms ║╚Execution stage complete. (29ms)
+261ms ╚Event processed successfully (261ms)
5/11/2020, 10:13:10 AM +783ms
+2ms ╔Received event [Sensor Hal Boven].motion = active with a delay of 83ms
+153ms ║RunTime Analysis CS > 21ms > PS > 62ms > PE > 70ms > CE
+156ms ║Runtime (38693 bytes) successfully initialized in 62ms (v0.3.110.20191009) (153ms)
+158ms ║╔Execution stage started
+173ms ║║Comparison (enum) off is (string) on = false (1ms)
+175ms ║║Cancelling condition #12’s schedules…
+176ms ║║Condition #12 evaluated false (12ms)
+178ms ║║Cancelling condition #1’s schedules…
+179ms ║║Condition group #1 evaluated false (state changed) (15ms)
+182ms ║╚Execution stage complete. (24ms)
+183ms ╚Event processed successfully (183ms)