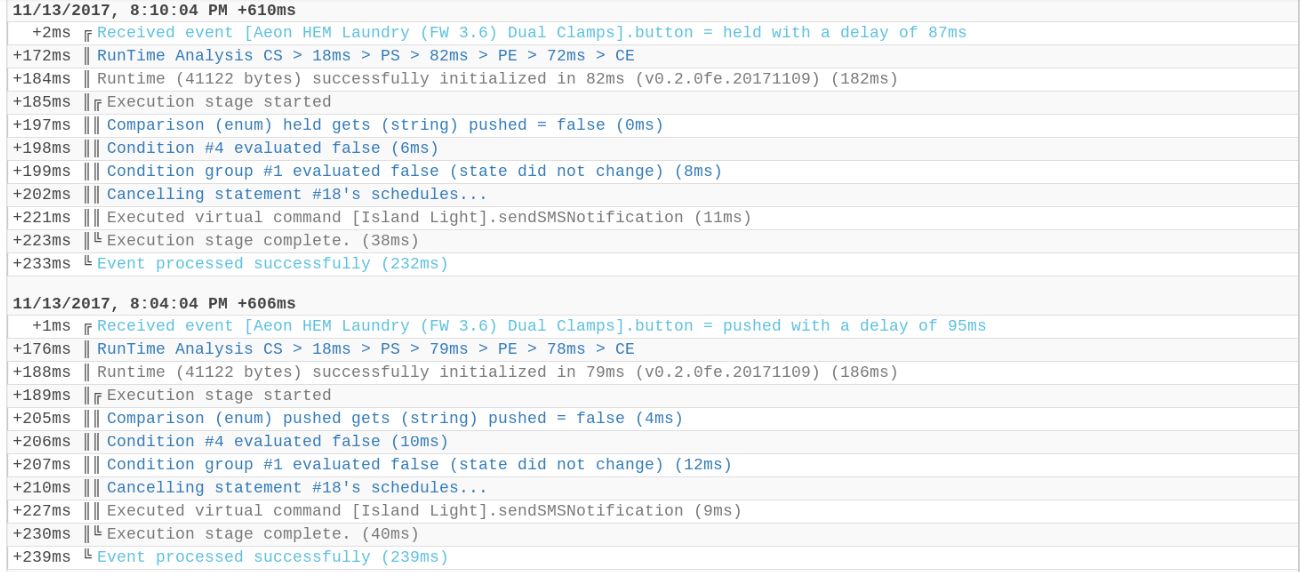
I have a piston that appears to be evaluating triggers that I have not asked it to monitor. See piston below and logs below.
I’m using an HEM energy monitor w/custom DTH that has one clamp on the washer, other on the dryer. Washer wattage is crazy all over the place during wash, so I’m using a simple timed piston. Washer starts, wait 50 min (length of standard cycle), notify it’s done.
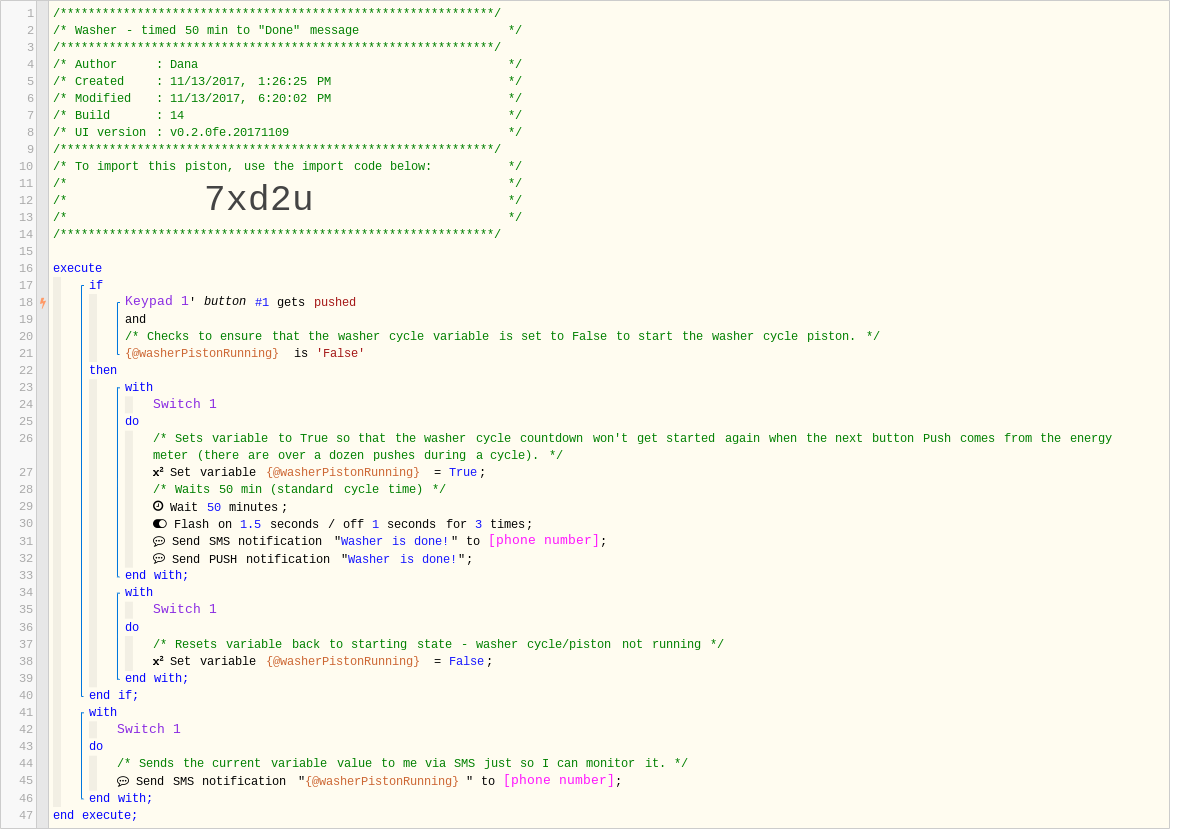
The trigger for the piston is a “button press” from the Aeon HEM (the DTH code creates one virtual button for each clamp, that can be pressed or held, depending on the watts usage). That works fine.
The problem is that in some cases the DTH sends a “held” signal for the button, and instead of ignoring it the piston accepts it and kills the timer, skips the done" messages and reset of the variable value, and drops down to the final “with” section of the piston that sends the current variable state to me via SMS.
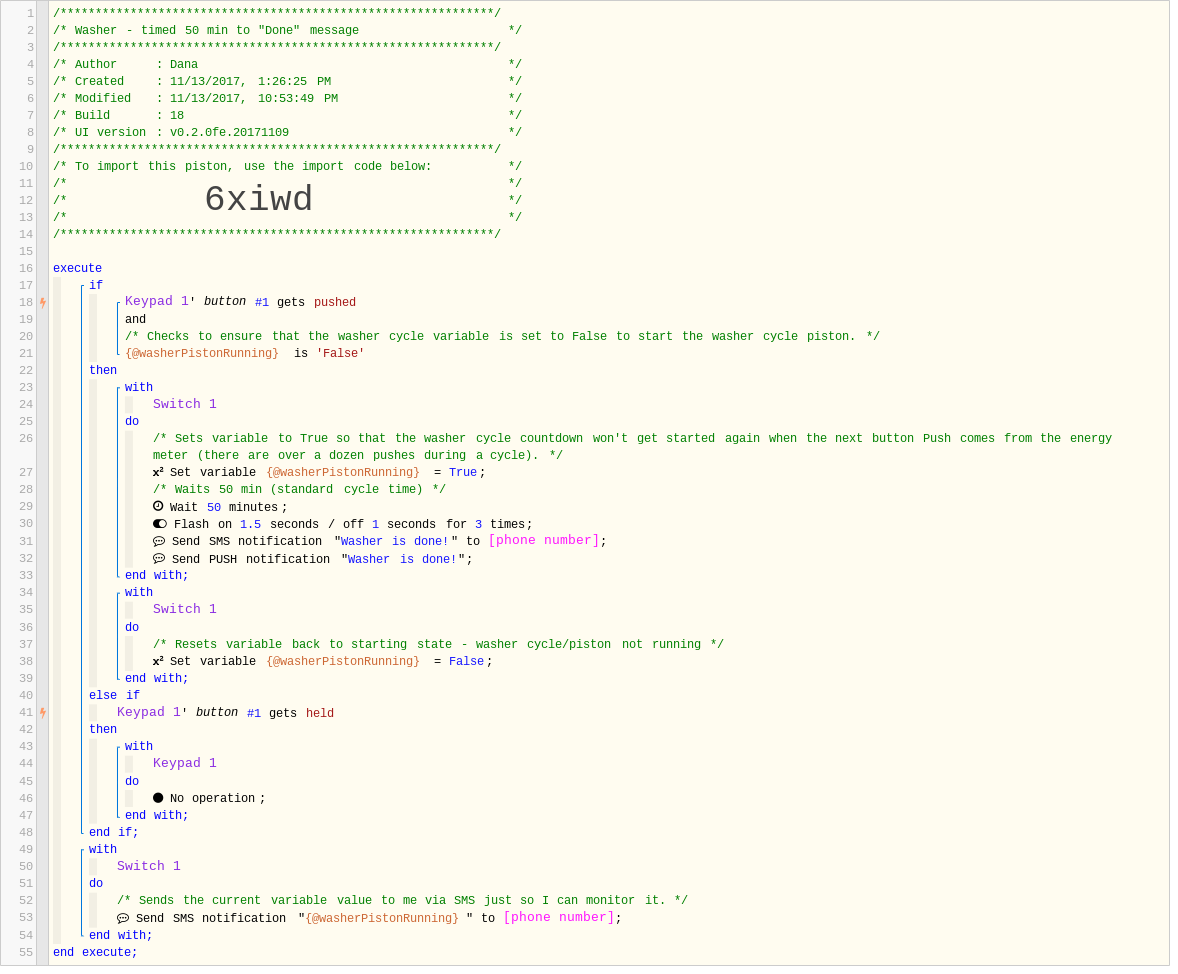
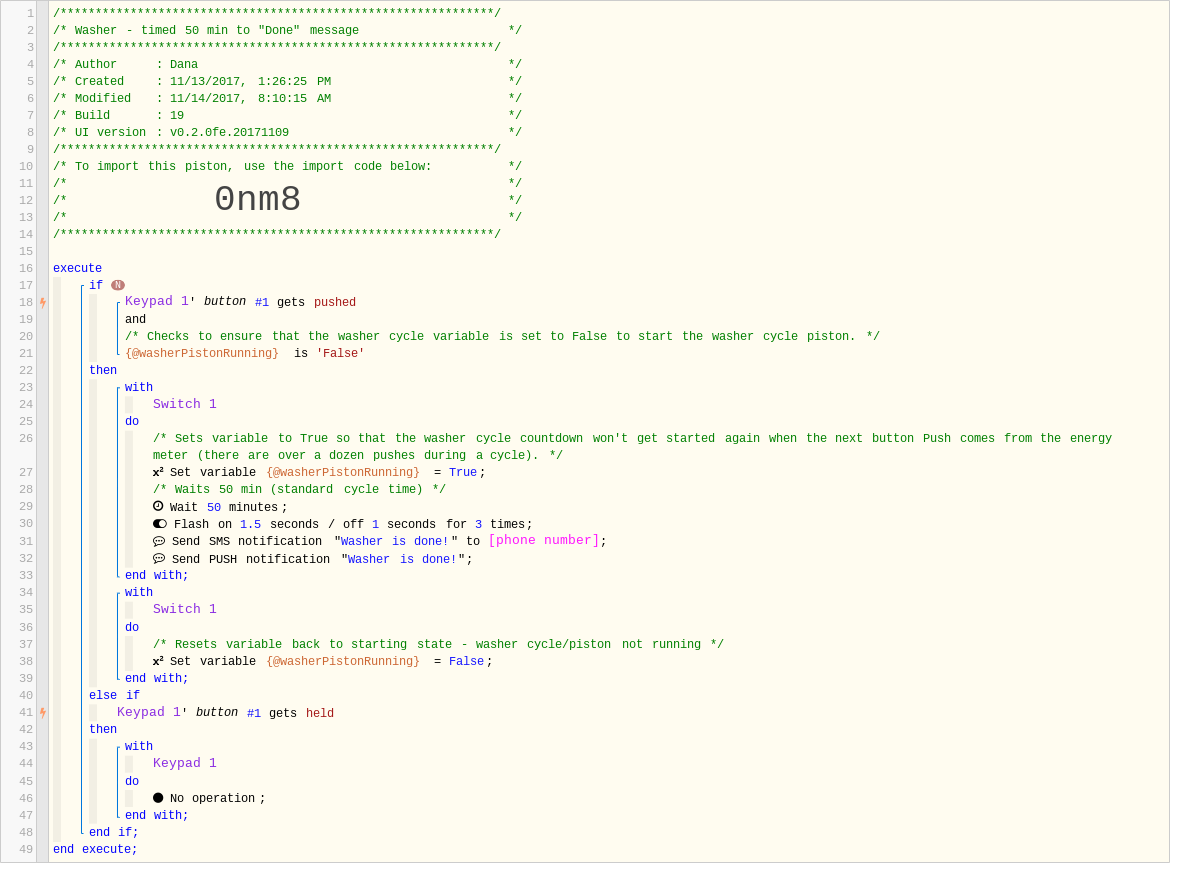
How do I get the piston to ignore the “Held” signal? I only want it to pay attention to the Push.