
1) Give a description of the problem
Hi all. This is my first piston and I read discussions about the Wait and TCP. So I have been trying to understand why my piston does not execute as I expect it to. I have modified the TCP for the if statement. If that is not the right approach, where and why the TCP needs to change? Per logs, the wake up command seems to be scheduled but then when the piston resumes, I do not see the command to turn off the switch. The bathroom sensor goes from active to inactive within 30 seconds. Is this related to my issue?
Here is what I am trying to achieve:
When the laundry sensor is active and there is no motion in the bathroom (different sensor) 30 seconds later, I want to turn off ceiling lights.
Any insights would be appreciated.
Thank you.
2) What is the expected behaviour?
Ceiling lights turn off
3) What is happening/not happening?
Ceiling lights do not turn off
4) Post a Green Snapshot of the piston![]()
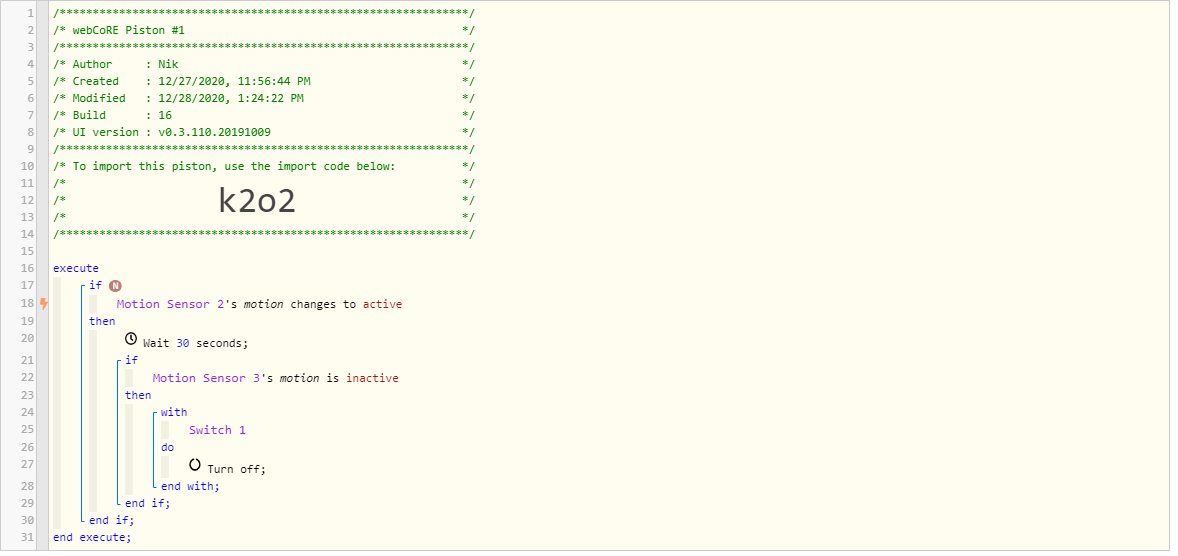
(UPLOAD YOUR IMAGE HERE)
5) Attach logs after turning logging level to Full
12/28/2020, 1:27:06 PM +45ms
+0ms ╔Received event [Home].time = 1609180027385 with a delay of -1341ms
+51ms ║RunTime Analysis CS > 16ms > PS > 4ms > PE > 31ms > CE
+53ms ║Runtime (37206 bytes) successfully initialized in 4ms (v0.3.110.20191009) (52ms)
+54ms ║╔Execution stage started
+55ms ║╚Execution stage complete. (0ms)
+56ms ╚Event processed successfully (56ms)
12/28/2020, 1:26:48 PM +697ms
+1ms ╔Received event [Motion Sensor Laundry].motion = inactive with a delay of 35ms
+42ms ║RunTime Analysis CS > 13ms > PS > 5ms > PE > 24ms > CE
+44ms ║Runtime (37210 bytes) successfully initialized in 5ms (v0.3.110.20191009) (42ms)
+45ms ║╔Execution stage started
+52ms ║║Comparison (enum) inactive changes_to (string) active = false (0ms)
+53ms ║║Cancelling condition #2’s schedules…
+54ms ║║Condition #2 evaluated false (5ms)
+55ms ║║Cancelling condition #1’s schedules…
+56ms ║║Condition group #1 evaluated false (state changed) (7ms)
+58ms ║╚Execution stage complete. (13ms)
+59ms ╚Event processed successfully (59ms)
12/28/2020, 1:26:37 PM +318ms
+1ms ╔Received event [Motion Sensor Laundry].motion = active with a delay of 42ms
+46ms ║RunTime Analysis CS > 18ms > PS > 4ms > PE > 24ms > CE
+48ms ║Runtime (37215 bytes) successfully initialized in 4ms (v0.3.110.20191009) (47ms)
+49ms ║╔Execution stage started
+56ms ║║Comparison (enum) active changes_to (string) active = true (1ms)
+57ms ║║Cancelling condition #2’s schedules…
+58ms ║║Condition #2 evaluated true (5ms)
+59ms ║║Cancelling condition #1’s schedules…
+60ms ║║Condition group #1 evaluated true (state changed) (7ms)
+62ms ║║Cancelling statement #3’s schedules…
+65ms ║║Executed virtual command wait (1ms)
+66ms ║║Requesting a wake up for Mon, Dec 28 2020 @ 1:27:07 PM EST (in 30.0s)
+70ms ║╚Execution stage complete. (21ms)
+71ms ║Setting up scheduled job for Mon, Dec 28 2020 @ 1:27:07 PM EST (in 29.996s)
+81ms ╚Event processed successfully (81ms)
12/28/2020, 1:26:23 PM +853ms
+0ms ╔Received event [Motion Sensor Laundry].motion = inactive with a delay of 38ms
+41ms ║RunTime Analysis CS > 14ms > PS > 3ms > PE > 25ms > CE
+43ms ║Runtime (37210 bytes) successfully initialized in 3ms (v0.3.110.20191009) (42ms)
+44ms ║╔Execution stage started
+50ms ║║Comparison (enum) inactive changes_to (string) active = false (0ms)
+52ms ║║Cancelling condition #2’s schedules…
+53ms ║║Condition #2 evaluated false (4ms)
+54ms ║║Cancelling condition #1’s schedules…
+54ms ║║Condition group #1 evaluated false (state changed) (7ms)
+56ms ║╚Execution stage complete. (12ms)
+57ms ╚Event processed successfully (58ms)
12/28/2020, 1:26:10 PM +762ms
+1ms ╔Received event [Motion Sensor Laundry].motion = active with a delay of 42ms
+48ms ║RunTime Analysis CS > 15ms > PS > 4ms > PE > 29ms > CE
+50ms ║Runtime (37215 bytes) successfully initialized in 4ms (v0.3.110.20191009) (48ms)
+51ms ║╔Execution stage started
+58ms ║║Comparison (enum) active changes_to (string) active = true (1ms)
+59ms ║║Cancelling condition #2’s schedules…
+60ms ║║Condition #2 evaluated true (5ms)
+61ms ║║Cancelling condition #1’s schedules…
+62ms ║║Condition group #1 evaluated true (state changed) (7ms)
+64ms ║║Cancelling statement #3’s schedules…
+66ms ║║Executed virtual command wait (0ms)
+67ms ║║Requesting a wake up for Mon, Dec 28 2020 @ 1:26:40 PM EST (in 30.0s)
+71ms ║╚Execution stage complete. (20ms)
+72ms ║Setting up scheduled job for Mon, Dec 28 2020 @ 1:26:40 PM EST (in 29.996s)
+79ms ╚Event processed successfully (79ms)
REMOVE BELOW AFTER READING
If a solution is found for your question then please mark the post as the solution.