1) Give a description of the problem
My Echo is making no announcements
2) What is the expected behaviour?
Trying to have it so that when Im driving home and Im within half a mile of the house, my kitchen echo announces that am I am arriving
3) What is happening/not happening?
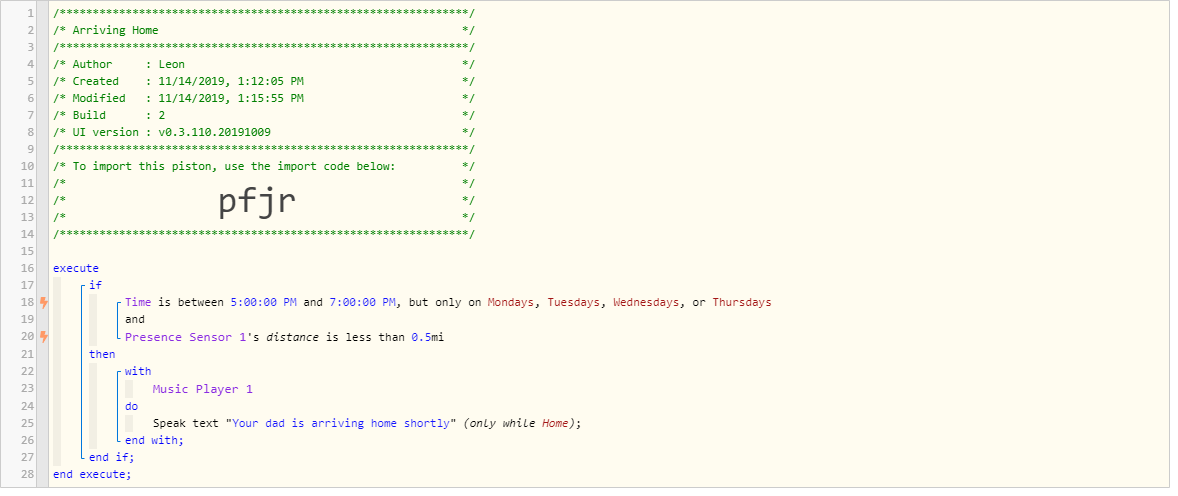
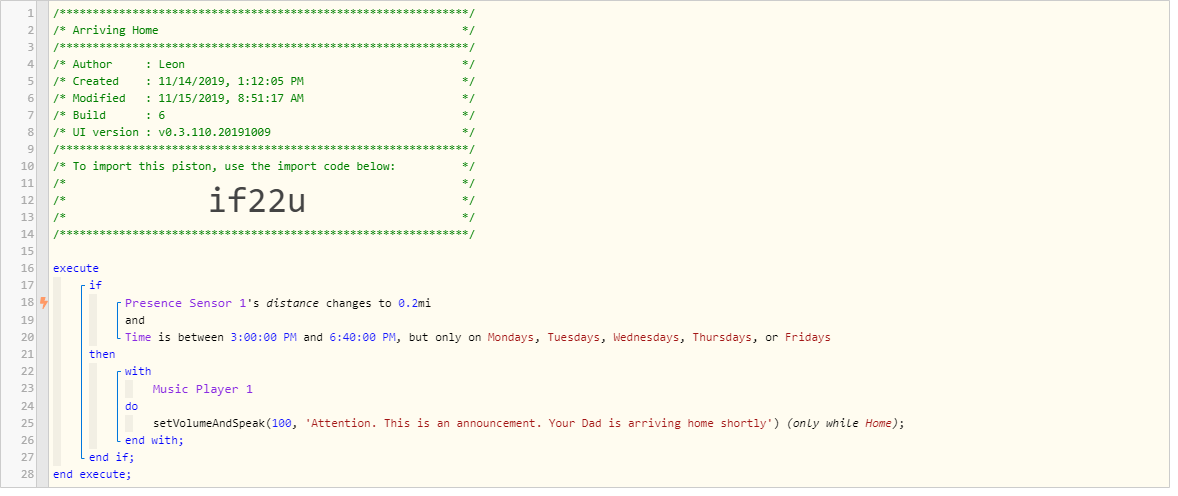
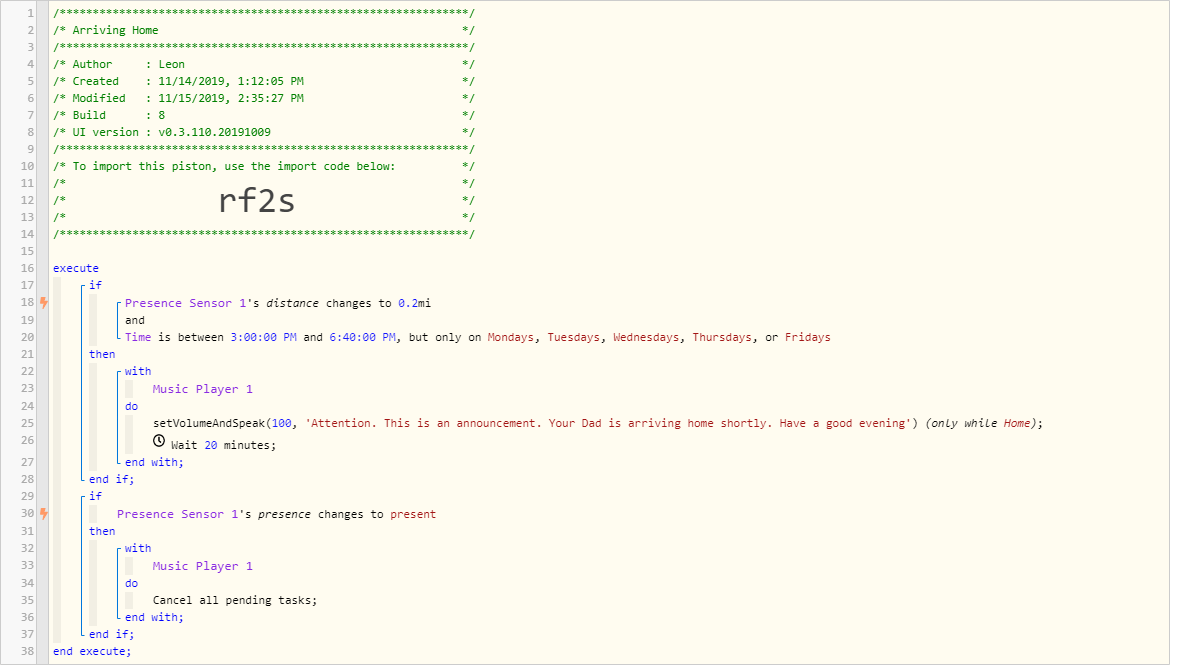
No announcement. Please bear with me Im knew to ST, webcore and Echo Speaks. If there is a better way to design this piston, please let me know, what Im doing wrong. Thanks!
4) Post a Green Snapshot of the piston![]()