
1) Give a description of the problem
I am putting together a piston that I want to start a wait after a sensor goes active (detects motion) but after it goes inactive the timer stops. I’ll probably throw in some more logic as I build out to decrease false-postives, but would like to get the ‘wait’ to work properly first. 
2) What is the expected behaviour?
That after the conditions are met (contact closed AND motion detected) the wait timer begins
3) What is happening/not happening?
After the sensor reports inactivity, the wait timer is cancelled
4) Post a Green Snapshot of the piston!
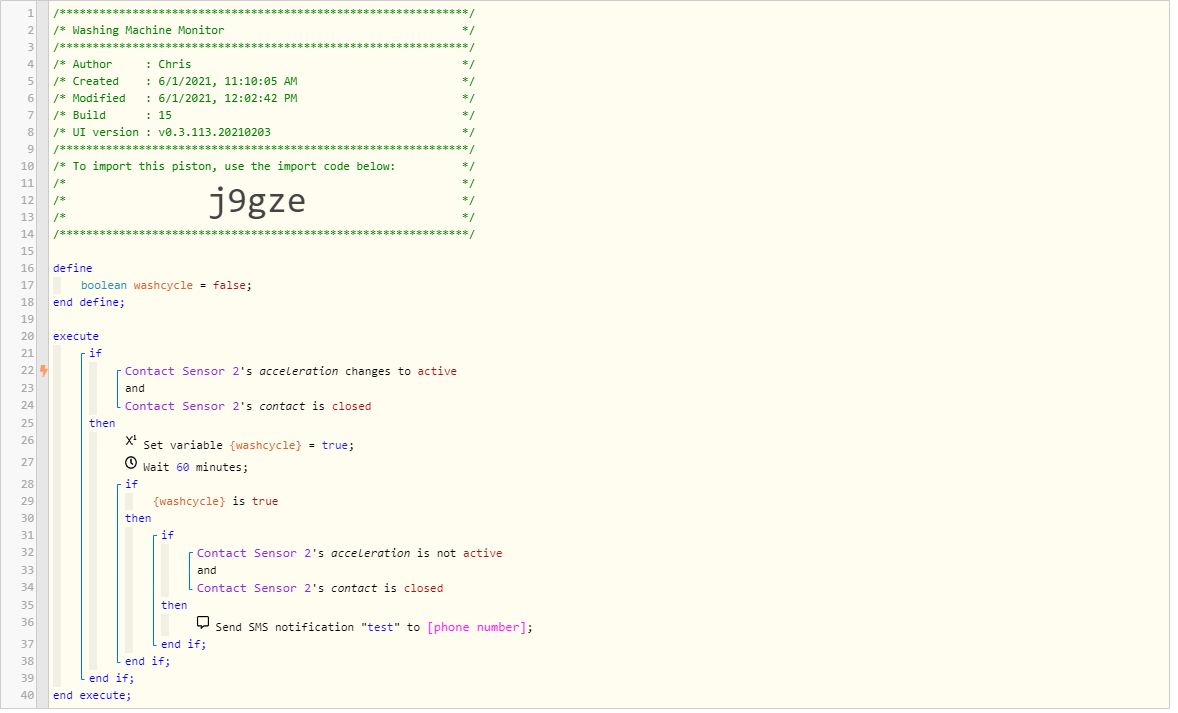
5) Attach logs after turning logging level to Full
6/1/2021, 12:09:48 PM +411ms
+2ms ╔Received event [Washing Machine].acceleration = inactive with a delay of 83ms
+47ms ║RunTime Analysis CS > 22ms > PS > 6ms > PE > 18ms > CE
+49ms ║Runtime (40429 bytes) successfully initialized in 6ms (v0.3.113.20210203) (46ms)
+50ms ║╔Execution stage started
+57ms ║║Comparison (enum) inactive changes_to (string) active = false (0ms)
+59ms ║║Cancelling condition #2’s schedules…
+60ms ║║Condition #2 evaluated false (5ms)
+61ms ║║Cancelling condition #1’s schedules…
+62ms ║║Condition group #1 evaluated false (state changed) (8ms)
+64ms ║╚Execution stage complete. (14ms)
+73ms ╚Event processed successfully (73ms)
6/1/2021, 12:09:22 PM +140ms
+1ms ╔Received event [Washing Machine].acceleration = active with a delay of 60ms
+39ms ║RunTime Analysis CS > 18ms > PS > 5ms > PE > 16ms > CE
+42ms ║Runtime (40434 bytes) successfully initialized in 5ms (v0.3.113.20210203) (40ms)
+43ms ║╔Execution stage started
+50ms ║║Comparison (enum) active changes_to (string) active = true (1ms)
+52ms ║║Cancelling condition #2’s schedules…
+52ms ║║Condition #2 evaluated true (5ms)
+61ms ║║Comparison (enum) closed is (string) closed = true (2ms)
+62ms ║║Condition #3 evaluated true (9ms)
+63ms ║║Cancelling condition #1’s schedules…
+64ms ║║Condition group #1 evaluated true (state changed) (17ms)
+66ms ║║Cancelling statement #4’s schedules…
+70ms ║║Executed virtual command setVariable (1ms)
+73ms ║║Cancelling statement #6’s schedules…
+76ms ║║Executed virtual command wait (1ms)
+77ms ║║Requesting a wake up for Tue, Jun 1 2021 @ 1:09:22 PM EDT (in 3600.0s)
+81ms ║╚Execution stage complete. (39ms)
+83ms ║Setting up scheduled job for Tue, Jun 1 2021 @ 1:09:22 PM EDT (in 3599s)
+90ms ╚Event processed successfully (90ms)
 Adjusting that seems to be the ticket!
Adjusting that seems to be the ticket!