I would. It won’t hurt to do it.
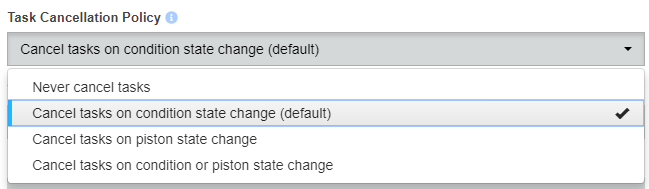
BTW, if you have TCP set to NEVER, and a wait set in a task that is counting down and the piston has turned false, if the piston should become true again, the tasks reset.
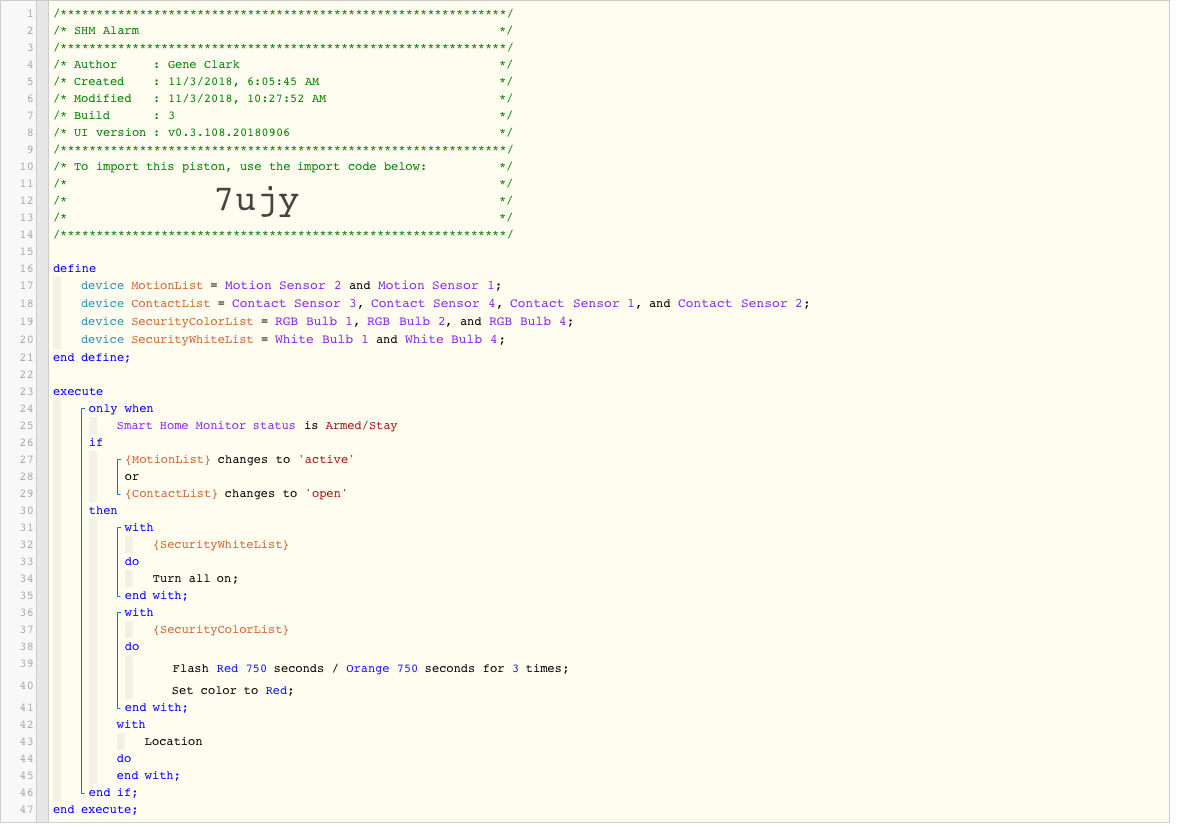
So in the piston below,
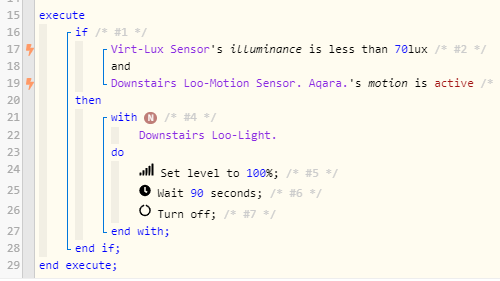
When motion becomes active and lux is below 7, the tasks will start (piston is true) and continue when the piston becomes false because of TCP being set to never. If it was set to default the wait would stop when motion became inactive and the light would never turn off, until the motion sensor was inactive for 90 seconds or illuminance goes greater the 7.
If set to never and motion should be detected again after, say, 60 seconds, the piston would become true again and the tasks would start afresh from the top.
So in this case if motion was continually being detected for 30 minutes, the light would never turn off.
Hope this example explains it a bit more on how TCP works.