To a certain point, yes.
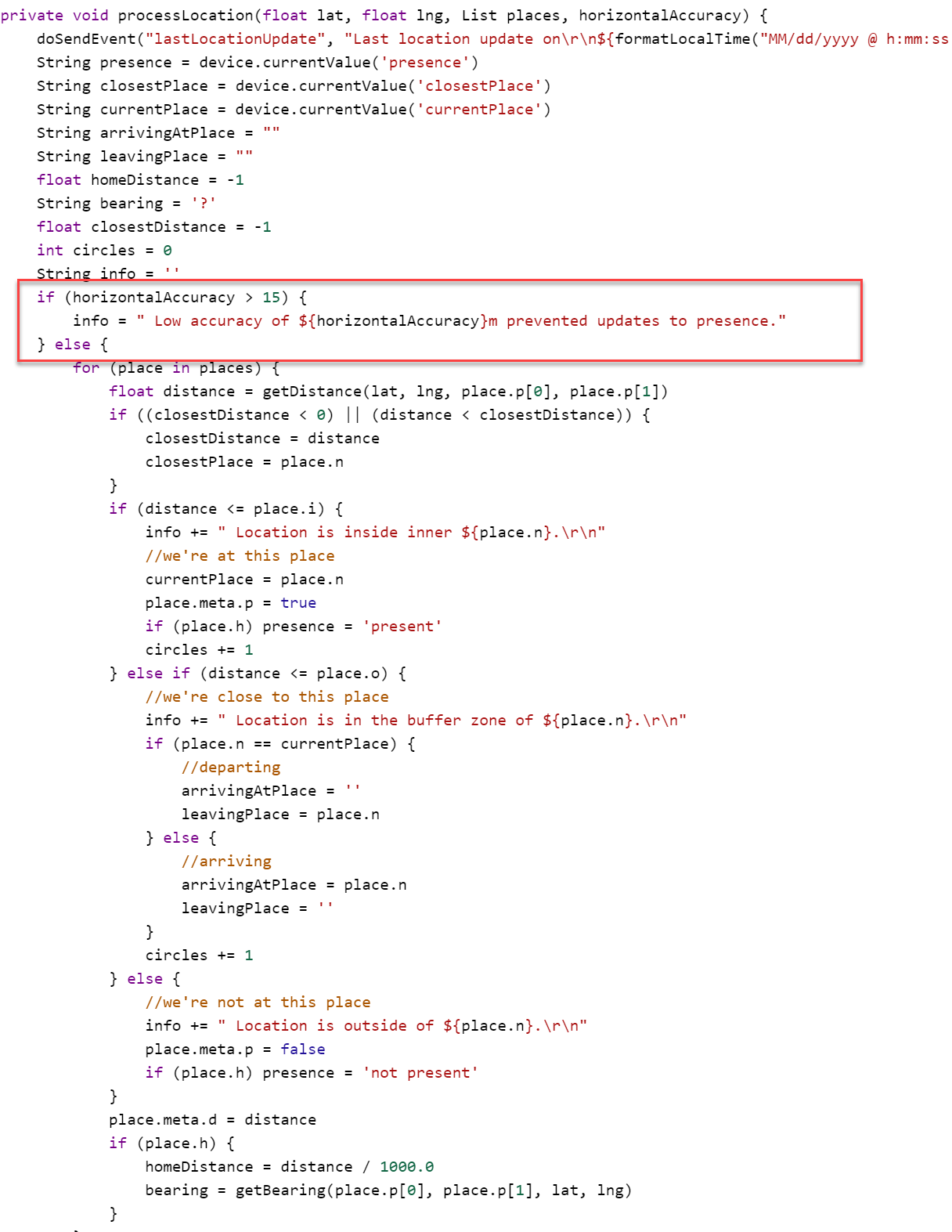
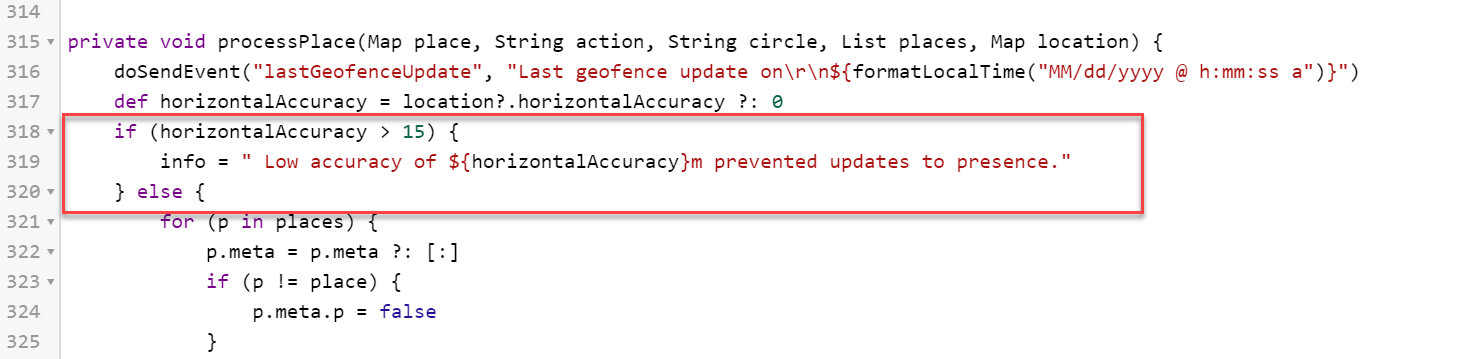
What I was told by ady was that the DH for the presence sensor could filter out the GPS updates from the phone:

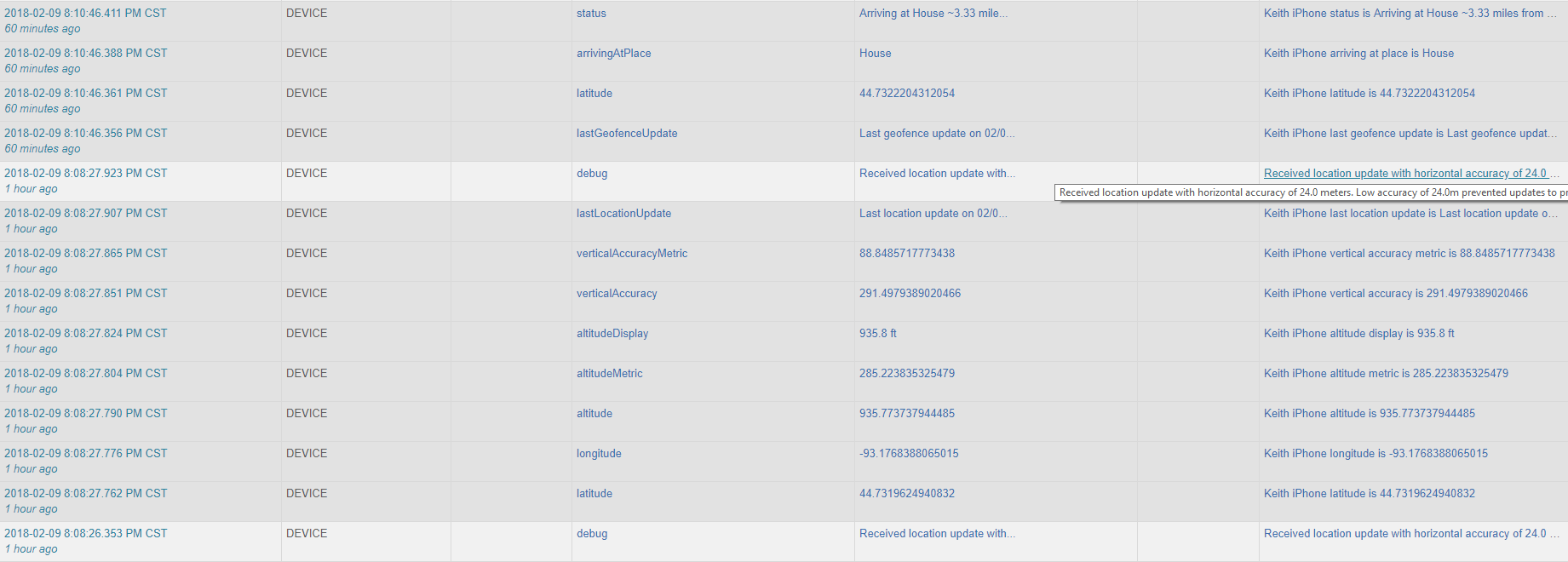
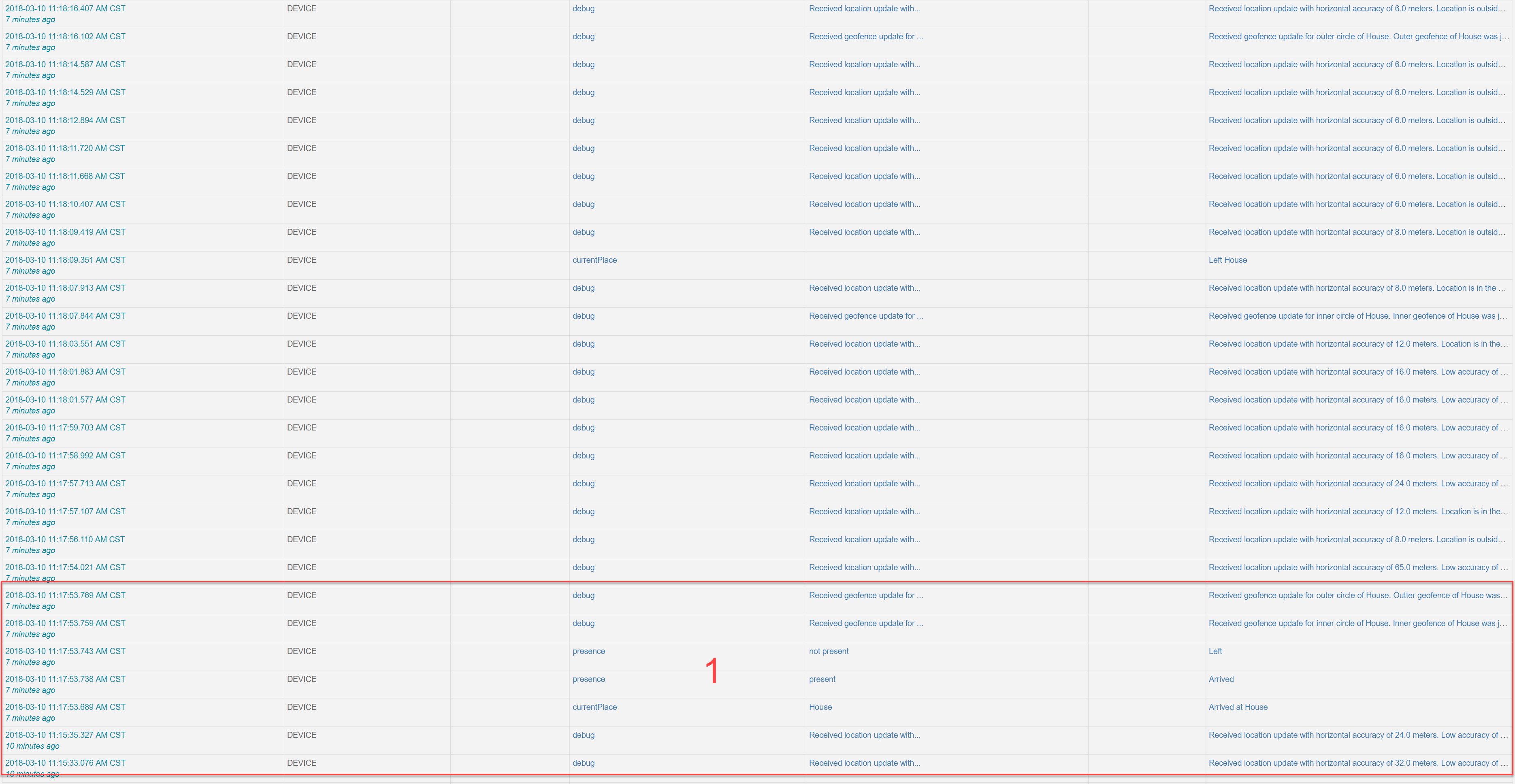
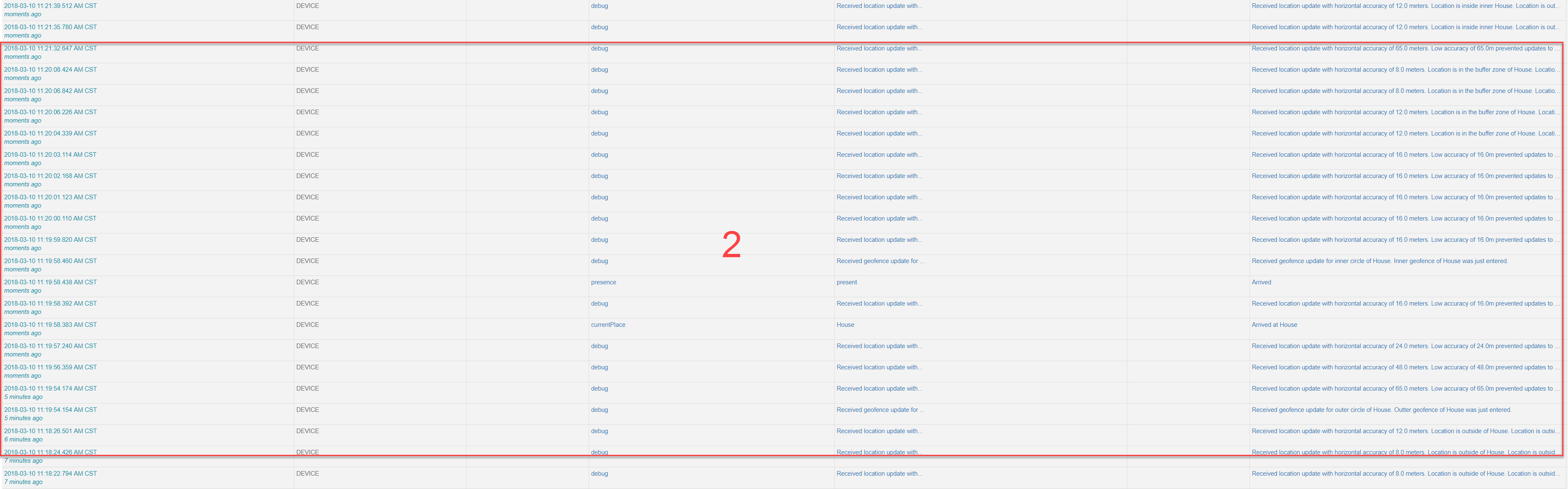
So what I tried was to copy the DH and I changed the horizontalAccuracy to something super low like 10M. Hoping that all the GPS updates lower than that would be filtered out and ignored (not triggering arrivingAt/DepartingFrom). This was not the case. Nothing really changed other than I see in the logs that, “Low accuracy of XXm prevented updates to presence.” The prescens events mentioned above were still happening. If you look at my map, I cannot make the geo fences smaller so I tried what I thought was the next best thing, filter out low accuracy.
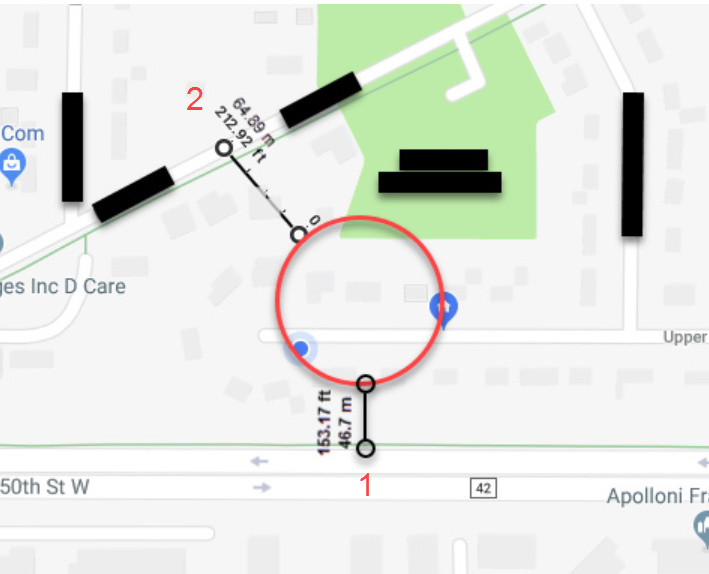
If you do the math on this, the limitations are 50M arrival and a maximum smallest departure of 250M. In all reality, I am getting updates on the geo fence side 350M + from when I need them (250M+ 100M horizontal accuracy since the code above really is not limiting or filtering anything from what I have seen).
A typical city block is 80M × 274M. So even if everything worked perfect. On the short side of a block you would be triggering events up to 4 blocks away.
Through the logs, I can consistently get under 20M GPS accuracy. In fact, I typically can get 10M. So why can’t the geo fences be smaller? The only real response I get is that, “this has been tested and anything smaller is giving false alarms.” My Arlo geo fences are a single geo fence and they work just fine. The standard ST geo fence is a single geo fence and it is a lot more accurate than the precense senor.
So here I am masking the issue by making a piston disregard false triggers rather than addressing the root cause 
Sorry this is wordy, but no one seems to be listening to me on this. I love the idea of these multiple locations, but how can anyone use them reliably? I live in a pretty spread out area. I can’t imagine the difficulties someone in a condensed city would have with this.

 hadnt seen that thread before. you are in good hands with
hadnt seen that thread before. you are in good hands with