Hi everyone…
I was going to add this to TUTORIALS but one of the admins can change it if they like it.
One of the most asked question I’ve seen is WHY WAIT IS NOT WORKING??
It could be many different reason but most new users are not aware TCP settings. (I wasn’t:)))))
I’m creating this very simple step by step instruction so at least I can refer users to this post instead of explaining it over and over.
1 - Your piston will run top to bottom in one go and won’t stop.
2 - If you want piston to HOLD and COUNT certain amount of seconds, minutes or even hours, you need to change your TCP settings. (TCP = Task Cancellation Policy)
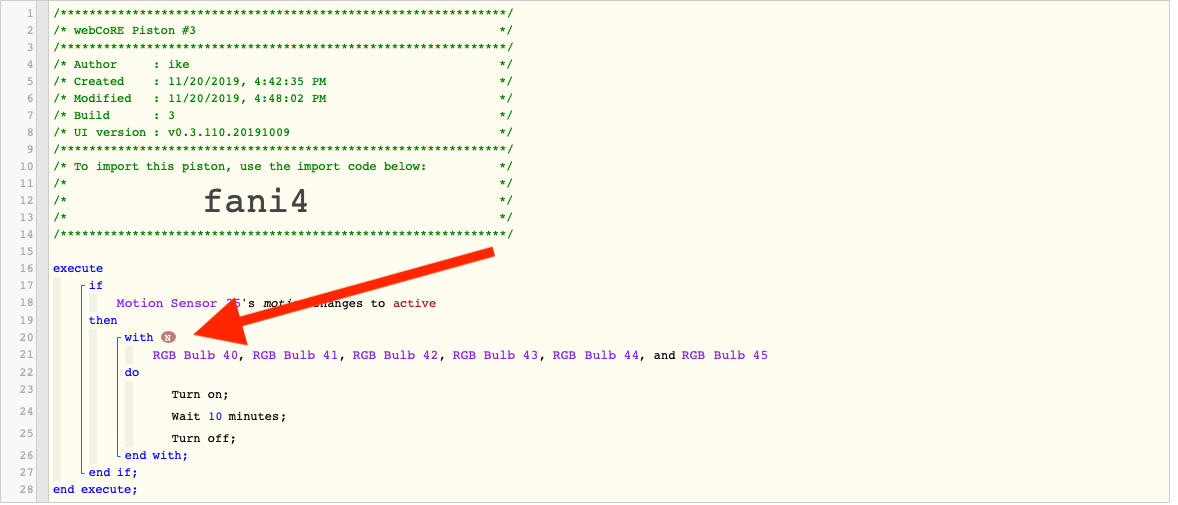
Here is a very simple piston.
If motion sensor gets activated, lights turn on and wait 10 minutes then turn off…
But look at the first picture, this piston WON’T do what I want…
Because TCP is not SET to NEVER…
It will come to WAIT (line 24) and won’t stop.
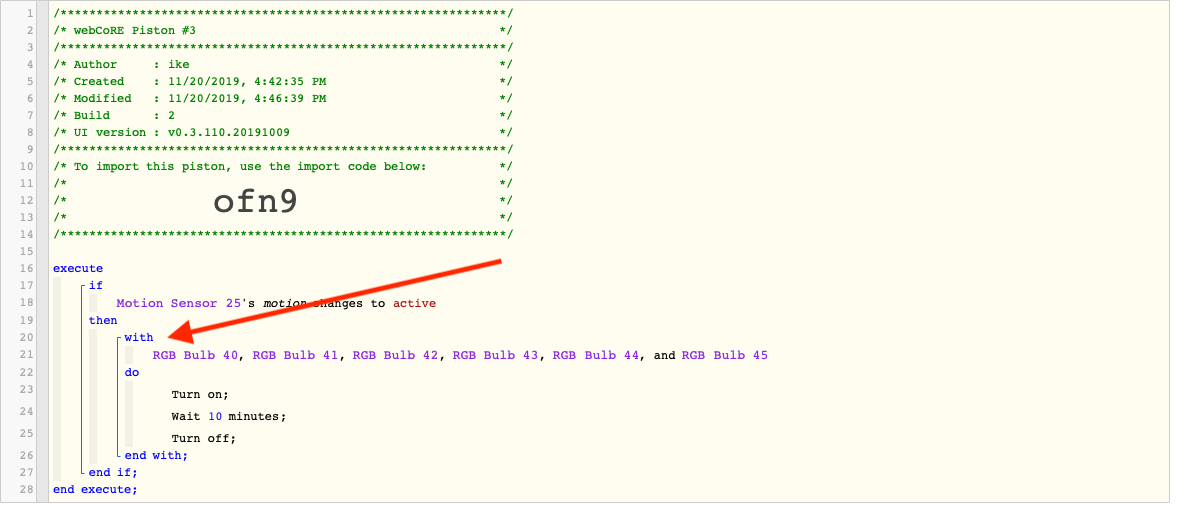
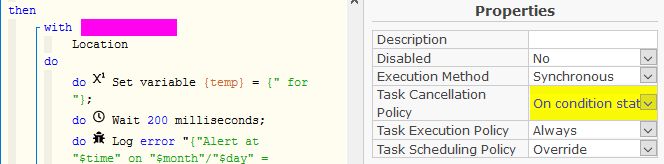
Here is what you need to do… Click on WITH (red arrow) line 20.
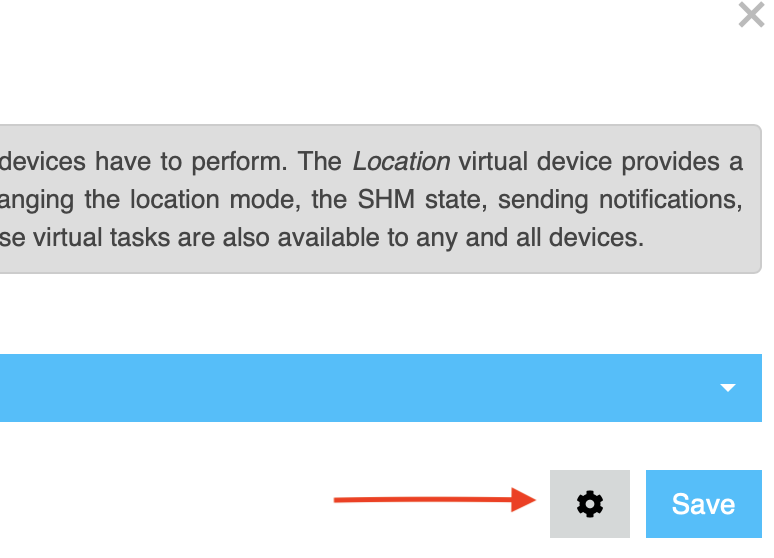
You’ll see a new setup window.
Clcik on the settings wheel…
Now you’ll see a new settings window…
Find the TCP (Shown below)
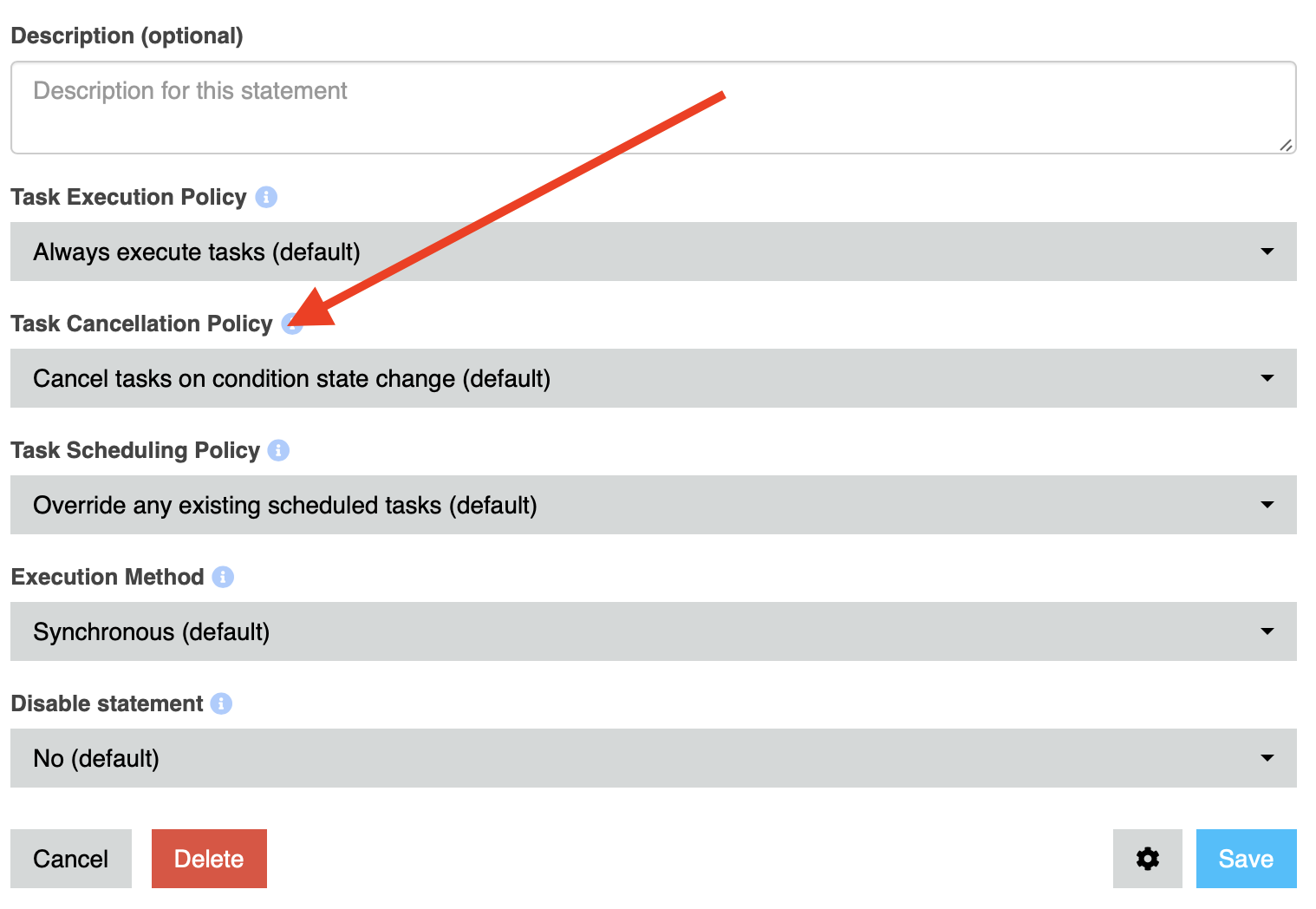
Now click on it and choose NEVER CANCEL TASK…This is how it’ll look
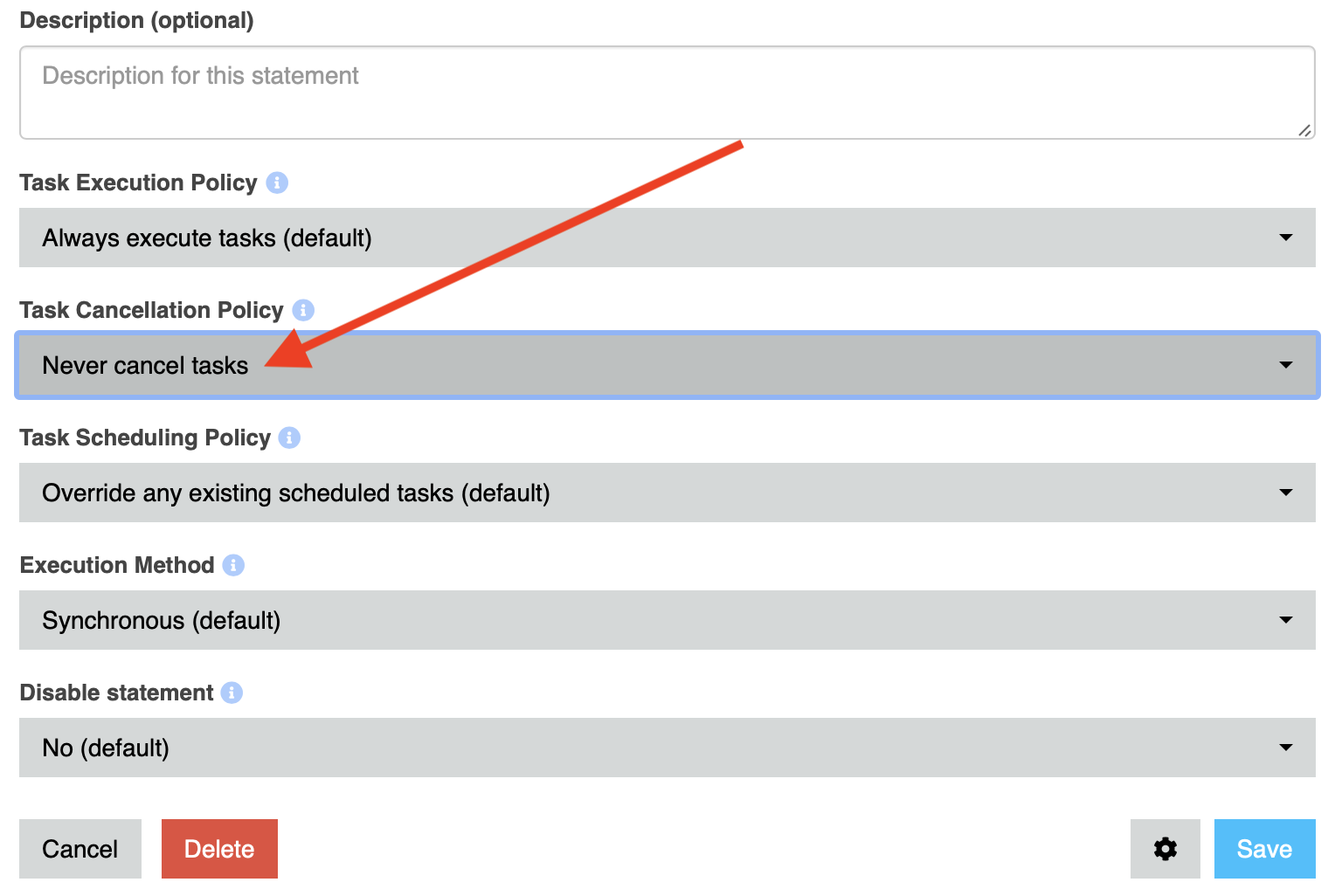
And finally SAVE this and when you go back to your piston, you’ll see a circled letter N (stands for NEVER)
Now you are good to go…
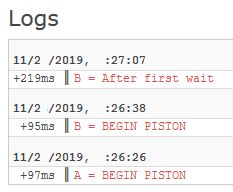
Run your piston.
Once motion is detected, lights will turn ON and you’ll see a count down, counting from X minutes to turn the lights OFF…